Welcome to PI's Press Information Pages
Here, you can find an overview of the management board at PI, current press information, press photos for downloading, and lots of other information.











Physik Instrumente (PI) at a Glance
The PI Group
Physik Instrumente (PI) is an internationally active group of companies focusing on precision positioning and piezo technology. For more than five decades, PI's products and technologies have been enabling customers to successfully complete motioning and positioning tasks, and implement actuator technologies and ultrasound applications with increasing precision and dynamics, hence pushing the boundaries of what is possible. In the process, accuracy of less than a millionth of a millimeter is achieved.
As a globally leading manufacturer of piezoceramic ultrasound and actuator technology components, and systems and subsystems for high-precision mechanical movements, the company focuses on four global markets:
- Industrial Automation: Positioning, Dosing, and Measuring Solutions for a Precise, Fast, and Economic Production and Process Monitoring
- Microscopy and Life Sciences: Innovative Diagnostic and Therapeutic Procedures with Precision Positioning, High-Speed Actuation, and Ultrasonic Solutions
- Semiconductor Manufacturing: Positioning Solutions for Improving Throughput and Enabling the Next Technology Node in Semiconductor Manufacturing
- Photonics: Fast and Precise Active Alignment for Testing, Assembly, and Packaging in Numerous Photonics Applications
The company invests almost 10 % of their turnover in research and development, and is continuing to expand their technology and market leadership. In this way, today, PI is already working on the solutions of tomorrow in order to support customers in industry and research to master technological leaps and be successful in their markets.
PI is present in all of the important technology regions, with nine production sites; four of which are in Germany and others in USA, Israel, Japan and China. There are also It's Possible Labs in Germany, China, Singapore and the USA, as well as 16 international sales subsidiaries. The parent company is Physik Instrumente (PI) SE & Co. KG, located in Karlsruhe, Germany.
The family business is managed in the second generation by Markus Spanner as Chief Executive Officer.
An Overview of the PI Group
CEO: Markus Spanner
Headquarters: Karlsruhe, Germany
Founding year: 1970
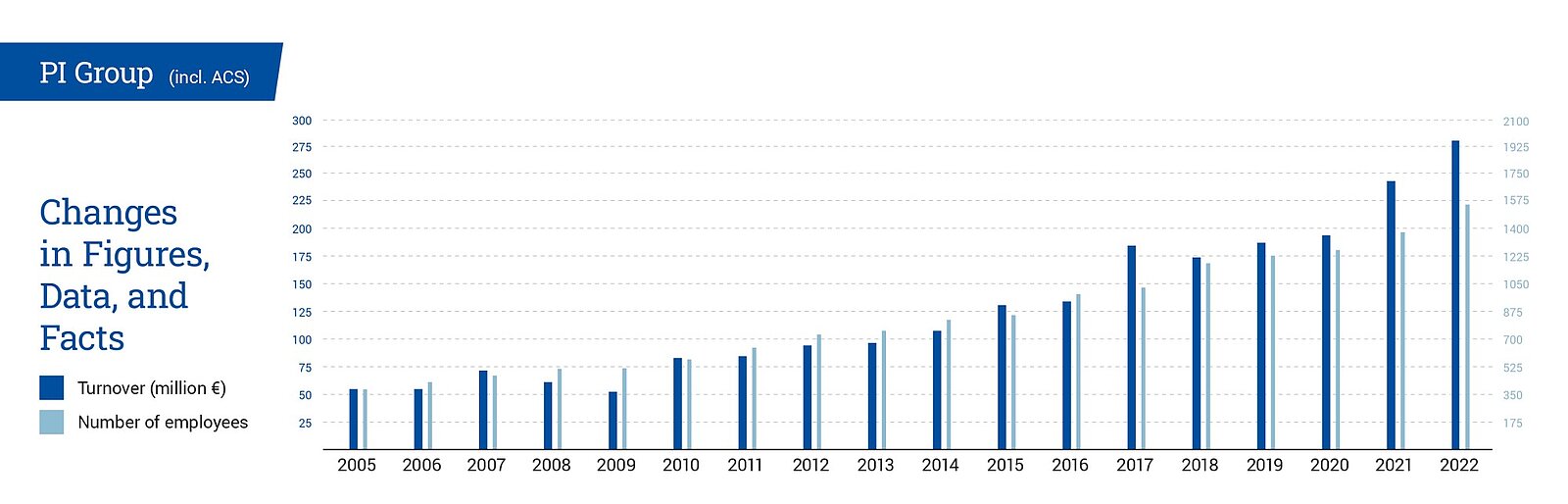
Employees: 1,790
Turnover in 2022: 282.2 million EUR
R&D Share: 9.8 % of the turnover (average in German mechanical engineering: 4.1 %)
Number of patents: About 500
PI worldwide:
- Nine production sites (four in Germany and others in the USA, Israel, Japan and China)
- Four It's Possible Labs: Karlsruhe (Germany), Shenzhen (China), Singapore, Fremont (USA)
- 16 sales subsidiaries



Markus Wiederspahn
Content Marketing Manager
Tel.: +49 721 4846 1819
Email: presse@pi.de