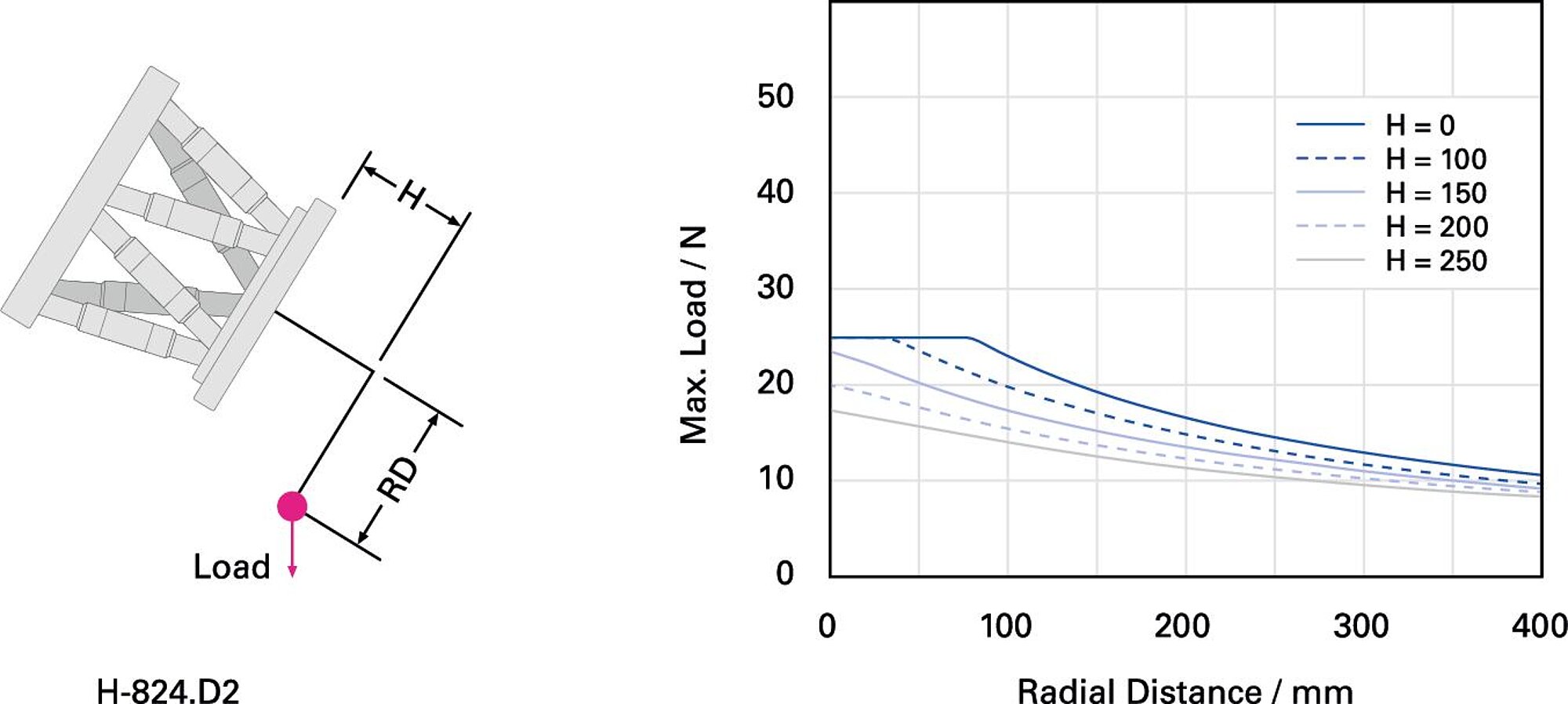
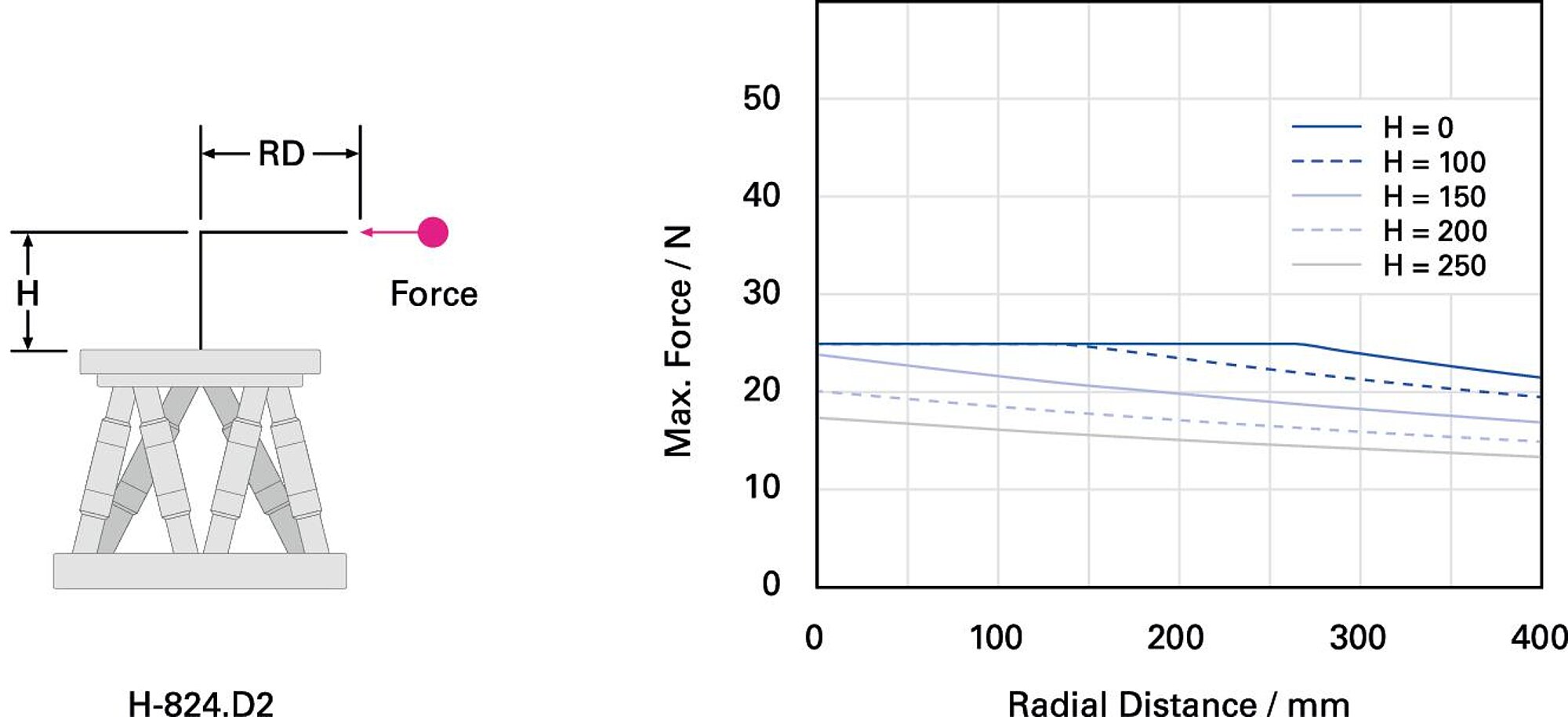
H-824.D2
Compact hexapod microrobot, direct drive, 25 mm/s, 5 kg load, D-sub connector. Connecting cables are not included in the scope of delivery and must be ordered separately.
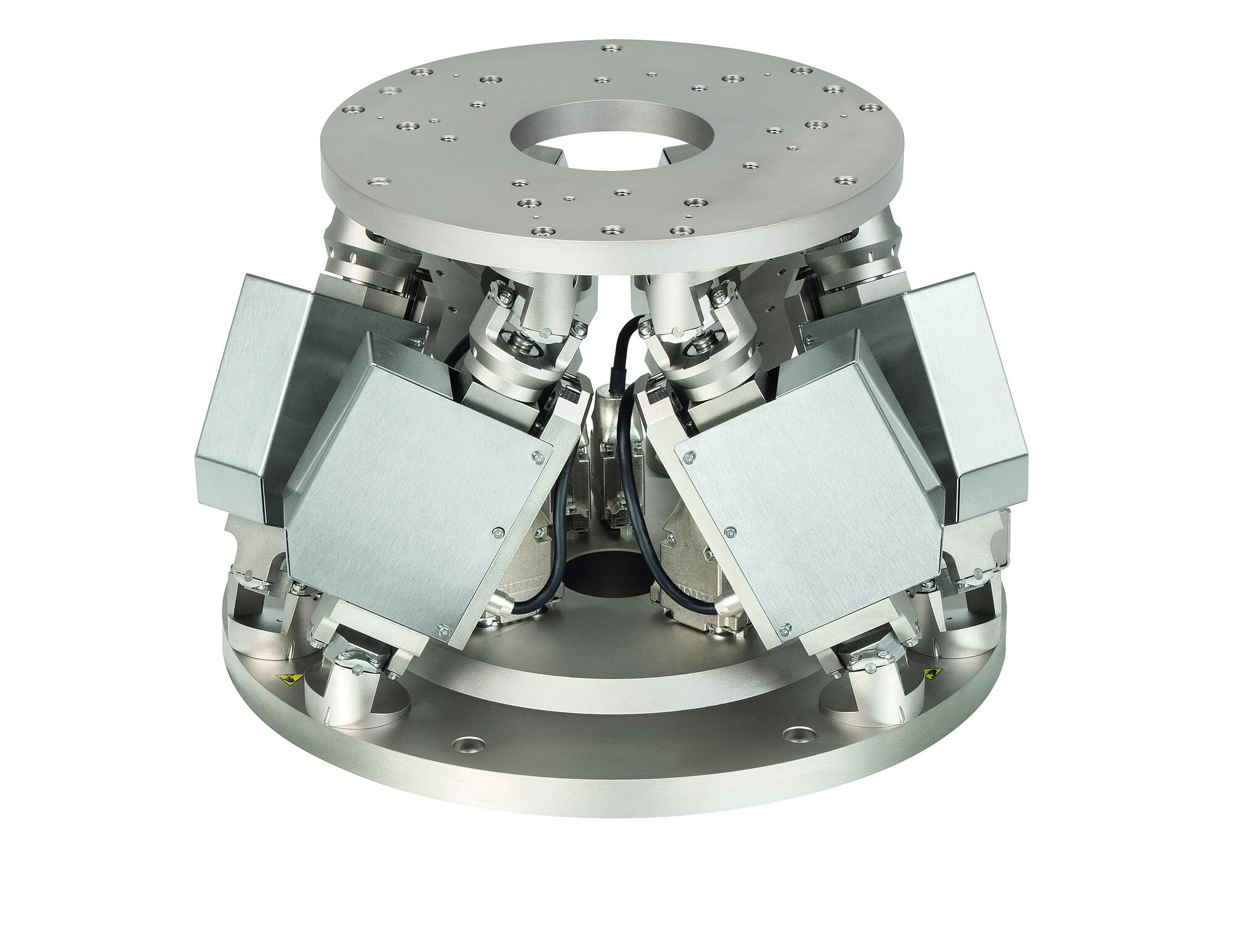

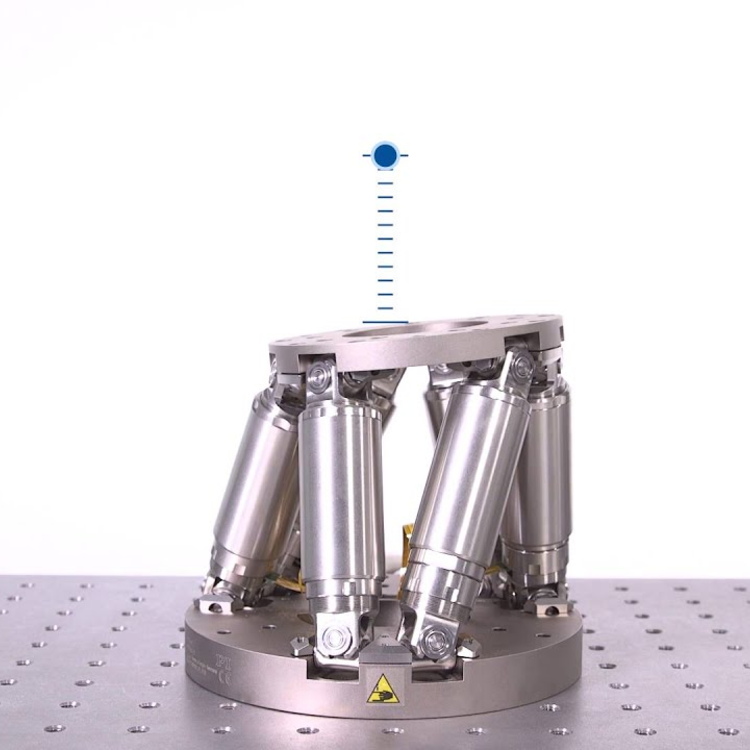












Precision-class 6-axis positioning system
Parallel-kinematic design for six degrees of freedom, making it significantly more compact and stiff than serial-kinematic systems, higher dynamics, no moved cables: Higher reliability, reduced friction. Compact due to folded drive design.
PIVirtualMove
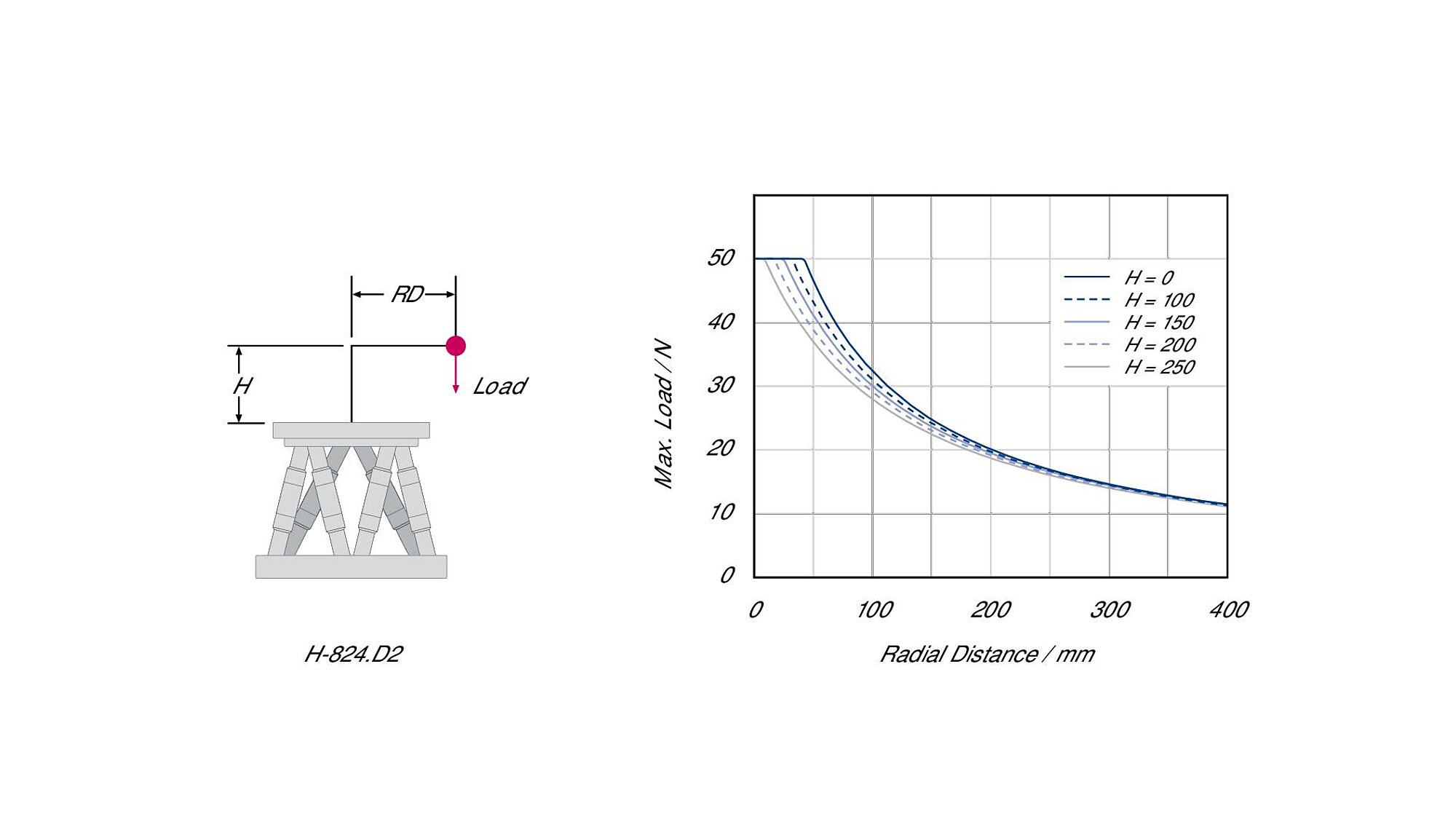
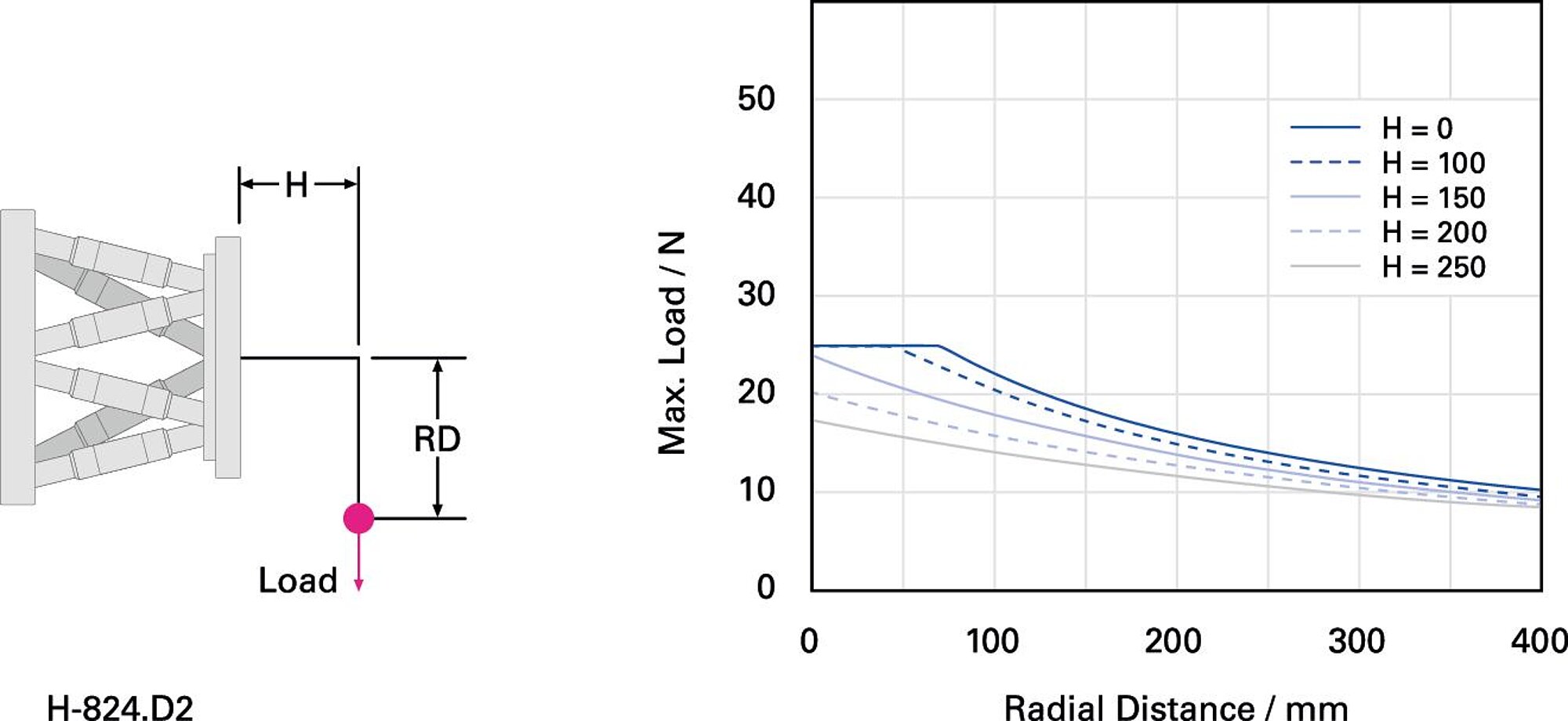
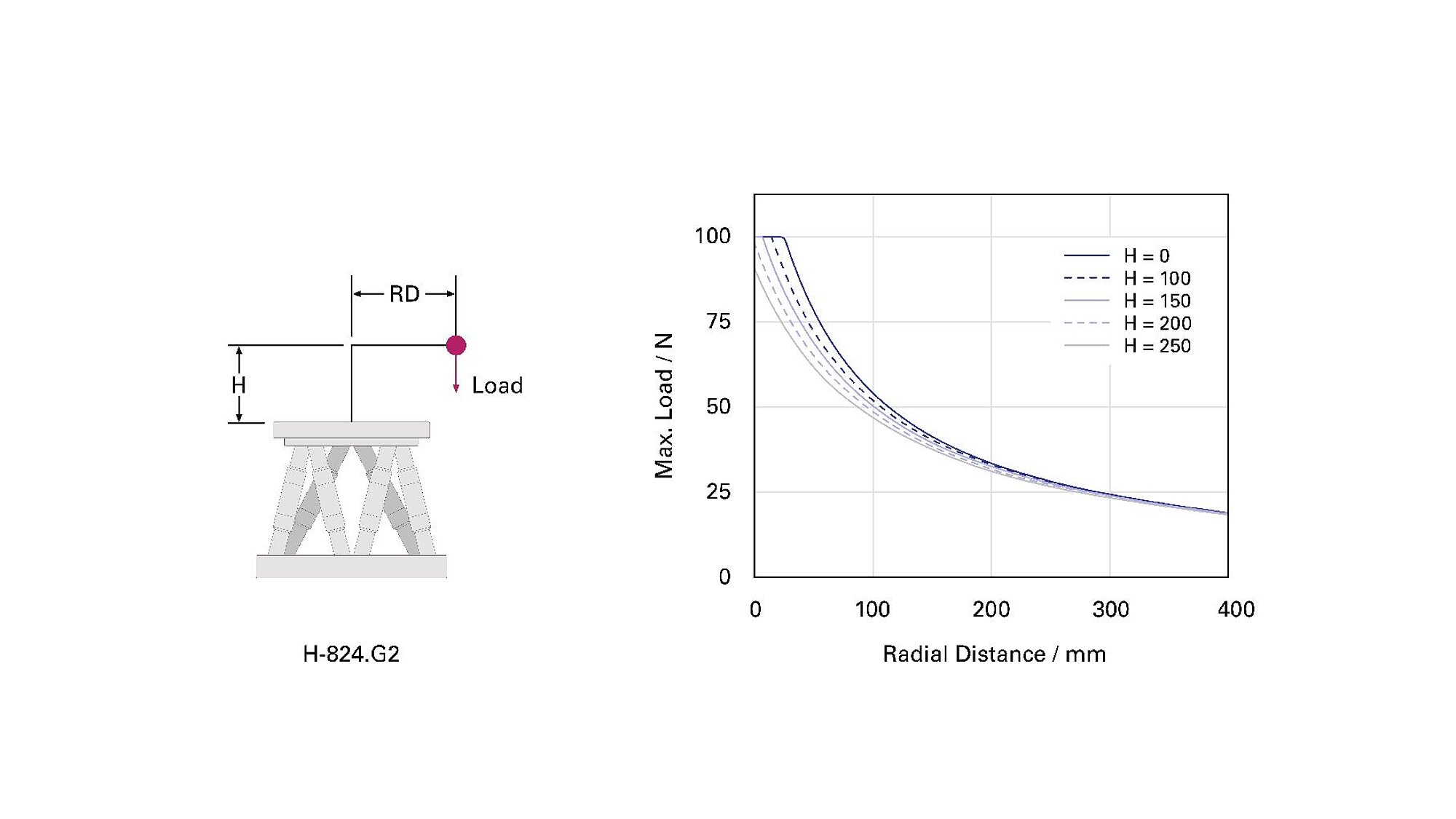
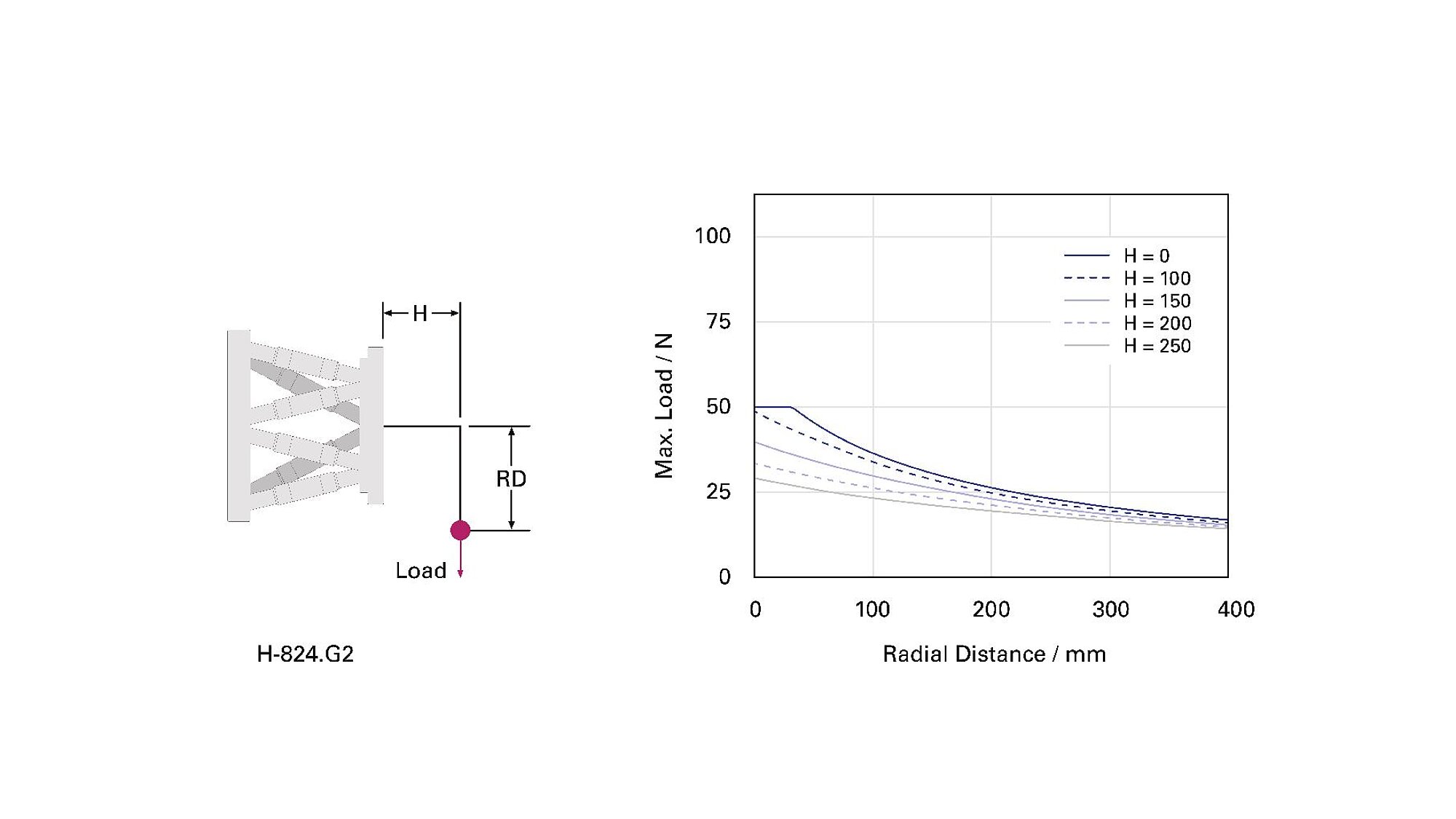
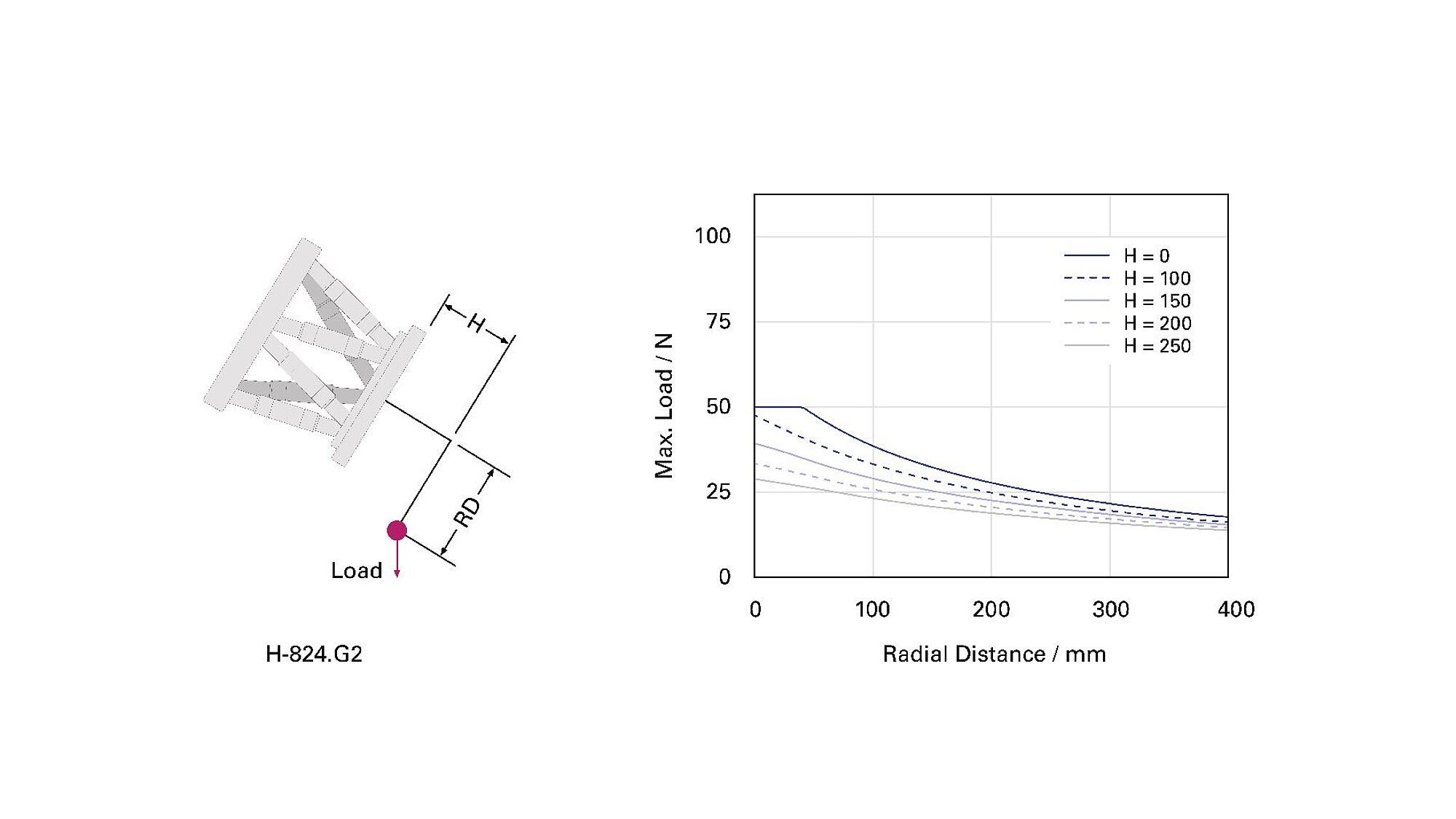
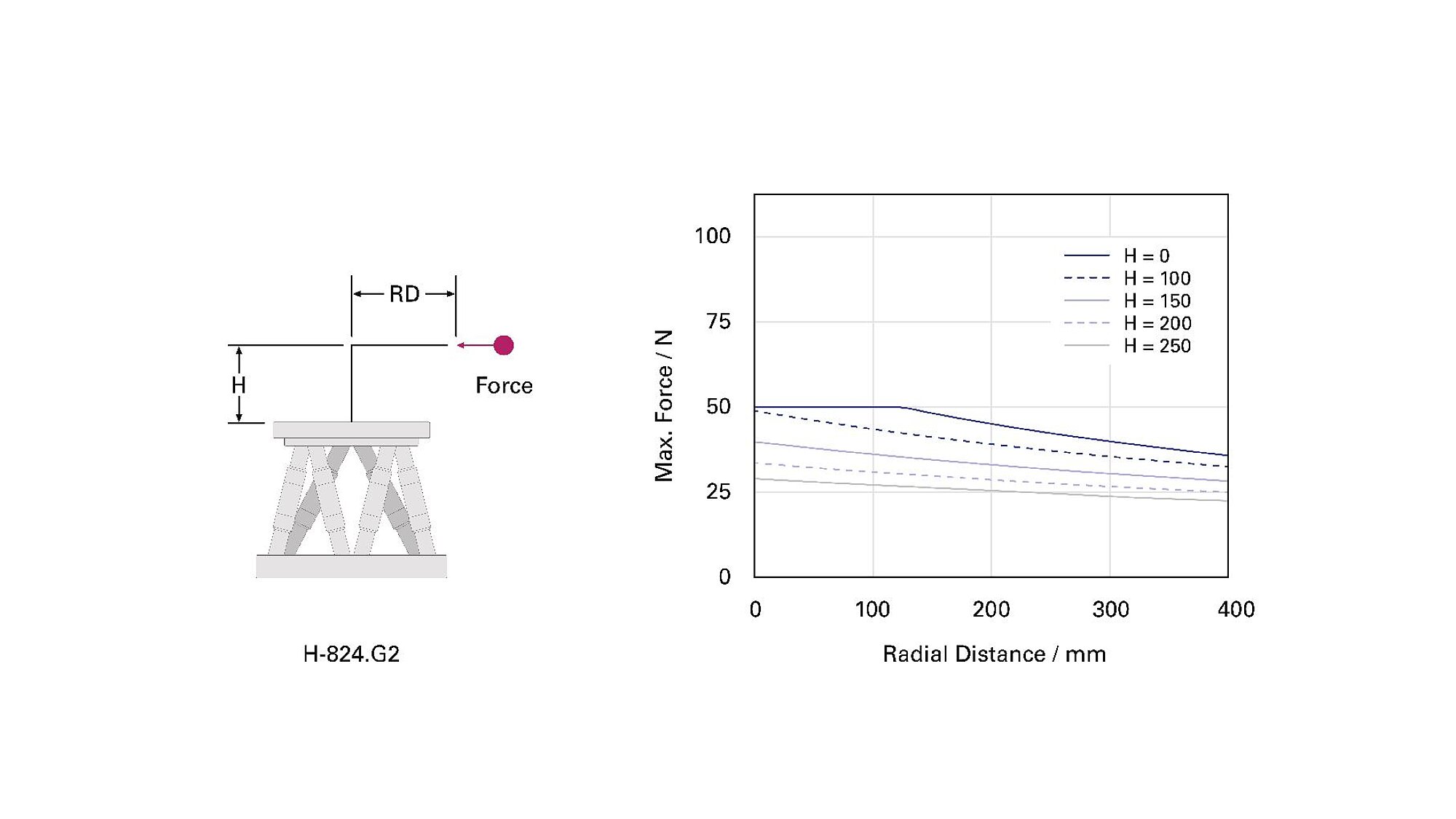
The simulation software simulates the limits of the workspace and load capacity of a hexapod. Therefore, even before purchasing, you can check whether a particular hexapod model can handle the loads, forces, and torques occurring in an application. For this purpose, the simulation tool takes the position and motion of the hexapod as well as the pivot point and several reference coordinate systems into account.
Application fields
Industry and research. For micromanipulation, biotechnology, semiconductor manufacturing
| Motion | H-824.D2 | H-824.G2 | Tolerance |
|---|---|---|---|
| Active axes | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Travel range in X | ± 22.5 mm | ± 22.5 mm | |
| Travel range in Y | ± 22.5 mm | ± 22.5 mm | |
| Travel range in Z | ± 12.5 mm | ± 12.5 mm | |
| Rotation range in θX | ± 7.5 ° | ± 7.5 ° | |
| Rotation range in θY | ± 7.5 ° | ± 7.5 ° | |
| Rotation range in θZ | ± 12.5 ° | ± 12.5 ° | |
| Maximum velocity in X | 25 mm/s | 1 mm/s | |
| Maximum velocity in Y | 25 mm/s | 1 mm/s | |
| Maximum velocity in Z | 25 mm/s | 1 mm/s | |
| Maximum angular velocity in θX | 270 mrad/s | 11 mrad/s | |
| Maximum angular velocity in θY | 270 mrad/s | 11 mrad/s | |
| Maximum angular velocity in θZ | 270 mrad/s | 11 mrad/s | |
| Typical velocity in X | 10 mm/s | 0.5 mm/s | |
| Typical velocity in Y | 10 mm/s | 0.5 mm/s | |
| Typical velocity in Z | 10 mm/s | 0.5 mm/s | |
| Typical angular velocity in θX | 55 mrad/s | 5.5 mrad/s | |
| Typical angular velocity in θY | 55 mrad/s | 5.5 mrad/s | |
| Typical angular velocity in θZ | 55 mrad/s | 5.5 mrad/s | |
| Positioning | H-824.D2 | H-824.G2 | Tolerance |
| Minimum incremental motion in X | 2 µm | 0.3 µm | typ. |
| Minimum incremental motion in Y | 2 µm | 0.3 µm | typ. |
| Minimum incremental motion in Z | 1 µm | 0.3 µm | typ. |
| Minimum incremental motion in θX | 12 µrad | 3.5 µrad | typ. |
| Minimum incremental motion in θY | 12 µrad | 3.5 µrad | typ. |
| Minimum incremental motion in θZ | 14 µrad | 3.5 µrad | typ. |
| Unidirectional repeatability in X | ± 0.5 µm | ± 0.25 µm | typ. |
| Unidirectional repeatability in Y | ± 0.5 µm | ± 0.25 µm | typ. |
| Unidirectional repeatability in Z | ± 0.15 µm | ± 0.1 µm | typ. |
| Unidirectional repeatability in θX | ± 3 µrad | ± 2 µrad | typ. |
| Unidirectional repeatability in θY | ± 3 µrad | ± 2 µrad | typ. |
| Unidirectional repeatability in θZ | ± 2.5 µrad | ± 2 µrad | typ. |
| Backlash in X | 1.5 µm | 2 µm | typ. |
| Backlash in Y | 1.5 µm | 2 µm | typ. |
| Backlash in Z | 1 µm | 0.7 µm | typ. |
| Backlash in θX | 15 µrad | 14 µrad | typ. |
| Backlash in θY | 15 µrad | 14 µrad | typ. |
| Backlash in θZ | 30 µrad | 17 µrad | typ. |
| Drive Properties | H-824.D2 | H-824.G2 | Tolerance |
| Drive type | DC motor | DC gear motor | |
| Nominal voltage | 24 V | 24 V | |
| Mechanical Properties | H-824.D2 | H-824.G2 | Tolerance |
| Stiffness in X | 1.7 N/µm | 1.7 N/µm | |
| Stiffness in Y | 1.7 N/µm | 1.7 N/µm | |
| Stiffness in Z | 7 N/µm | 7 N/µm | |
| Maximum load capacity, base plate in any orientation | 2.5 kg | 5 kg | |
| Maximum load capacity, base plate horizontal | 5 kg | 10 kg | |
| Maximum holding force, base plate in any orientation | 5 N | 50 N | |
| Maximum holding force, base plate horizontal | 15 N | 100 N | |
| Overall mass | 8 kg | 8 kg | |
| Material | Aluminum | Aluminum | |
| Miscellaneous | H-824.D2 | H-824.G2 | Tolerance |
| Operating temperature range | -10 to 50 °C | -10 to 50 °C | |
| Connector for data transmission | HD D-sub 78 (m) | HD D-sub 78 (m) | |
| Connector for supply voltage | M12 4-pole (m) | M12 4-pole (m) | |
| Recommended controllers / drivers | C-887.5x | C-887.5x |
Technical data specified at 22±3 °C.
The maximum travel ranges of the individual coordinates (X, Y, Z, θX, θY, θZ) are interdependent. The data for each axis shows its maximum travel range when all other axes are in the zero position of the nominal travel range and the default coordinate system is in use, or rather when the pivot point is set to 0,0,0.
Connecting cables are not included in the scope of delivery and must be ordered separately.
Ask about customized versions.
H-824 Compact Microrobot
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
Compact hexapod microrobot, direct drive, 25 mm/s, 5 kg load, D-sub connector. Connecting cables are not included in the scope of delivery and must be ordered separately.
Compact hexapod microrobot, gearhead, 1 mm/s, 10 kg load, D-sub connector. Connecting cables are not included in the scope of delivery and must be ordered separately.
Quickly receive an answer to your question by email or phone from a local PI sales engineer.

PI offers high-precision drives for use as EtherCAT slave, or integrates with ACS Motion Controllers as Master, or 2nd Master in an existing architecture.

Hexapod platforms are used for precision positioning and alignment of loads in all six degrees of freedom, three linear axes, and three rotational axes.

At Diamond Light Source, UK, beamline I07 is a high-resolution X-ray diffraction beamline dedicated to investigate the structure of surfaces and interfaces.

Investigation of the structural properties of thin films under high-vacuum conditions.

At the X-ray light source PETRA III at the DESY research center in Hamburg operates the Imaging Beamline P05.
Hexapods allow for an outstanding flexibility for a variety of samples of in-line automation systems by minimizing the space for motion robotics.












