PIVirtualMove
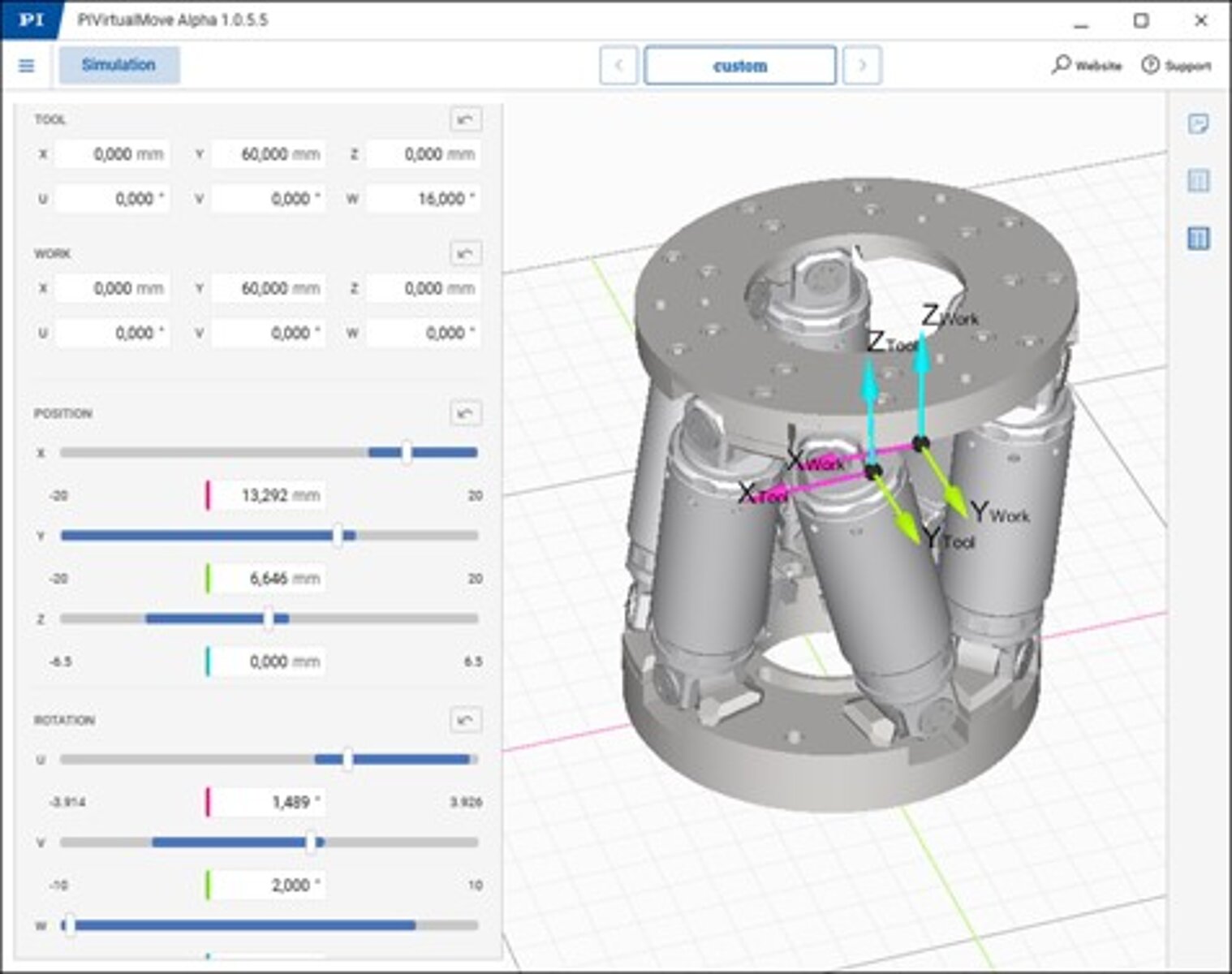
PIVirtualMove ist ein neues Programm für die Verifizierung der Bewegung und Berechnung des Arbeitsraums für Hexapoden und dem 6-DoF Nanocube.
Bei solch komplizierten mehrachsigen Mechaniken kann nicht jeder Punkt innerhalb des Arbeitsraumes der individuellen Achsen erreicht werden. Die Grenzen des zulässigen Arbeitsraums einer Parallelkinematik variieren aber in Abhängigkeit von der aktuellen Position, der Einbaulage, sowie von den Kräften und Drehmomenten, die auf die Bewegungsplattform wirken. Es ist daher notwendig bei der Auswahl des Systems die Erreichbarkeit der Punkte zu gewährleisten. Hierbei unterstützt PIVirtualMove:
- Überprüfen der Erreichbarkeit der Positionen in Abhängigkeit der Montageposition und der Last (Kraft- und Positionsarbeitsraum)
- Freie Definition des Koordinatensystems, des Pivotpunkts, der Montageposition und der Lasten
- Auswahl der Mechaniken aus unserer Datenbank mit Verlinkung zum Datenblatt
- Der Betrieb der Software ist ohne Verbindung zu einem Controller oder Positionierer möglich
PIVirtualMove ist der Nachfolger von PIHexapodSimulationTool.
PIVeriMove
Eingeschränkte Platzverhältnisse bergen Gefahren sowohl für Bewegungs- und Positioniersysteme als auch für Aufbauten auf der Bewegungsplattform und für die Umgebung. Auch bei größter Sorgfalt im Design eines Versuchsaufbaus oder einer Produktionseinheit lässt sich die Gefahr einer Kollision nicht immer vermeiden. Mit der offline Kollisionserkennung berechnet die Software PIVeriMove die erlaubten Stellwege für Hexapoden, wenn Objekte im Bewegungsbereich vorhanden sind: Sei es ein Probenaufbau oder die Wand einer Vakuumkammer.
Die in der Software erstellten Konfigurationen können als Grundlage für geometrische Berechnungen an den Hexapod übermittelt werden. Der Sicherheitsabstand zu den Objekten wird während des Betriebs vor jedem Bewegungs- oder Positionskommando überprüft. Im Falle einer drohenden Kollision wird die Bewegung nicht ausgeführt (online Kollisionserkennung). Um die Sicherheit zu erhöhen, kann ein Mindestabstand vorgegeben werden, der unabhängig von der Raumrichtung übernommen wird. Der Pivotpunkt, also der Bezugspunkt für Drehungen der Plattform, kann dabei jederzeit neu gesetzt werden.
- Berechnung der zulässigen Stellwege für Hexapoden und eine offline Kollisionsanalyse
- Import von 3D-Objekten, die auf der beweglichen Plattform oder in der Umgebung des Hexapods befestigt sind, um ein Szenario zu definieren
- Berechnung der kleinsten Entfernung zwischen Objekten
- Übermittlung der Arbeitsraumgrenzen an den Controller
- Der Pivotpunkt kann verändert werden, ohne dass das Hindernisszenario neu konfiguriert werden muss
- Zur Nutzung der Kollisionserkennung ist eine zusätzlich Lizenz notwendig. Diese Funktion ist nur mit dem C-887 verfügbar
Emulatoren
Oft besteht der Wunsch nach einer frühzeitigen Implementierung der Kundensoftware, ohne dass das System dabei vor Ort zur Verfügung steht. PI bietet geeignete Software, die zur Simulation eines vollständigen Hexapodsystems (Hexapodmechanik und -controller) oder der neuesten Controller-Plattform als virtuelle Maschine auf dem Host-PC dient. So können Kunden schon vor Erhalt des Systems Anwenderprogramme entwickeln, testen und optimieren.
PIControllerEmulatorGCS3.0
- Emulation des Controller-Verhaltens in Bezug auf die GCS3.0 Eingabe
- Code kann ohne Hardware getestet werden
- Vereinfacht die Automatisierung
- Ermöglicht Frontloading und virtuelle Inbetriebnahme: Vorbereitung auf die Integration noch vor der Lieferung des Controllers & Positionierers
- Die Kommunikation mit dem emulierten Controller erfolgt via TCP/IP, sodass PIMikroMove oder die bekannten APIs genutzt werden können
PIHexapodEmulator
- Programm, mit dem der C-887 und der angeschlossene Hexapod sowie zwei zusätzliche Achsen emuliert werden können (GCS2)
- Für Nutzer, die das Verhalten des Hexapod-Systems bei Eingabe von GCS-Kommandos testen wollen, wenn der echte Hexapod-Controller noch nicht verfügbar ist
- Das simulierte Hexapod-System kann mit PIMikroMove® oder jeglicher TCP/IP Verbindung betrieben werden
Um diese Tools nutzen zu können, ist eine Installation von QEMU 2.12.0 notwendig. QEMU ist eine freie Virtualisierungssoftware, die die gesamte Hardware der Controller emulieren kann. Installationsprogramme für Windows können hier heruntergeladen werden:
Downloads
PIVirtualMove
C-990.CD1 Releasenews
Benutzerhandbuch C887T0001
Beschreibung der Software PIHexapodEmulator