Hexapoden in der Mikromontage
Was haben optische Komponenten, Glasfasern in der Photonik, mobile Endgeräte und hochwertige Armbanduhren gemeinsam? In allen Fällen geht es darum, bei der Montage die einzelnen Komponenten, Bauelemente oder Werkstücke präzise zu positionieren, meist sogar in mehreren Achsen. Sind diese Arbeitsabläufe voll- oder teilautomatisiert, ist man auf die Signale externer Sensoren, Kameras oder Machine-Vision-Lösungen angewiesen. Das verwendete Positioniersystem sollte sich deshalb möglichst einfach in den übergeordneten Automatisierungsverbund integrieren lassen.
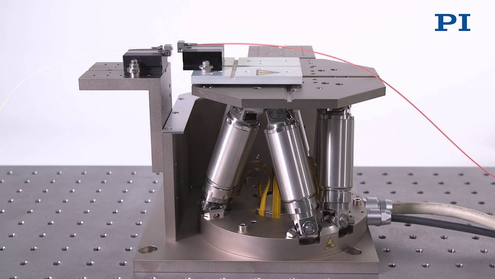
Präzise mit sechs Freiheitsgraden positionieren
Hier bieten sich sogenannte Hexapoden, also sechsachsige parallelkinematische Positioniersysteme an. Sie können auf den Mikrometer genau positionieren. Aufgrund ihrer hohen Steifigkeit haben sie praktisch keine Einschwingzeit, wenn die Position erreicht ist. Sie positionieren die Lasten, also Bauteile, Kamerasysteme oder optische Fasern, in sechs Achsen im Raum, drei linearen und drei rotatorischen.
Dabei wirken alle Antriebe auf eine einzige bewegte Plattform, woraus sich weitere Vorteile gegenüber seriellen, also gestapelten Systemen ergeben: bessere Bahntreue, größere Wiederholgenauigkeit und Ablaufebenheit, eine geringere bewegte Masse und damit eine höhere Dynamik, die für alle Bewegungsachsen gleich ist, kein Kabelmanagement und ein deutlich kompakterer Aufbau. Der Drehpunkt (Pivot-Punkt) des Hexapoden ist dabei frei definierbar.
Leistungsfähiger Digitalcontroller kommuniziert mit der Steuerung
Hexapoden erfordern aufgrund ihres parallelkinematischen Aufbaus eine besondere Ansteuerung. Deshalb werden sie als Komplettlösung mit einem leistungsfähigen Digitalcontroller ausgeliefert. Dieser übernimmt alle Berechnungen, die notwendig sind, um die vom Anwender in kartesischen Koordinaten vorgegebenen Fahrbefehle für das parallelkinematische Sechsachssystem entsprechend umzusetzen, also die Transformation der kartesischen Soll-Positionen in die Ansteuerung der Einzelantriebe. Außer den Hexapod-Achsen kann der Digitalcontroller noch zwei weitere Achsen ansteuern, z.B. Linearversteller für eine Grobpositionierung über lange Stellwege oder einen Drehtisch für Bewegungen um 360°. Auch die Anbindung an eine übergeordnete Steuerung ist einfach möglich. Die SPS kann mit dem Hexapodsystem dann z.B. über EtherCat kommunizieren. Sie gibt als Master die kartesische Soll-Position bzw. Bahnen im Raum vor und bekommt die Ist-Positionen ebenfalls über die Feldbusschnittstelle zurückgemeldet. Der Hexapodcontroller verhält sich gegenüber der SPS dann wie ein intelligenter Antrieb.
Handtellergroßes, sechsachsiges Positioniersystem
Das beim Hexapoden verwendete parallelkinematische Prinzip lässt sich jedoch auch anderweitig nutzen: Das SpaceFab-Prinzip basiert auf drei Kreuztischen, die über drei Beine mit konstanter Länge und eine geeignete Gelenkkonfiguration gemeinsam eine Plattform positionieren. Auf diese Weise lassen sich ebenfalls schnelle und hochpräzise Verfahrwege realisieren. Vertreter der SpaceFAB-Baureihe können so klein sein, dass sie mühelos auf einem Handteller Platz finden.

