空回 (Backlash)
驱动方向为反向时出现的位置误差。空回由动力传动系统部件之间的机械游隙引起,例如减速齿轮或轴承,或由导向系统中的摩擦引起。空回还取决于温度、加速度、负载、丝杠位置、方向、磨损等。通过预加载动力传动系统可以减少空回。一种可以直接确定平台位置并消除动力传动系统中的任何误差(直接测量)的测量方法。
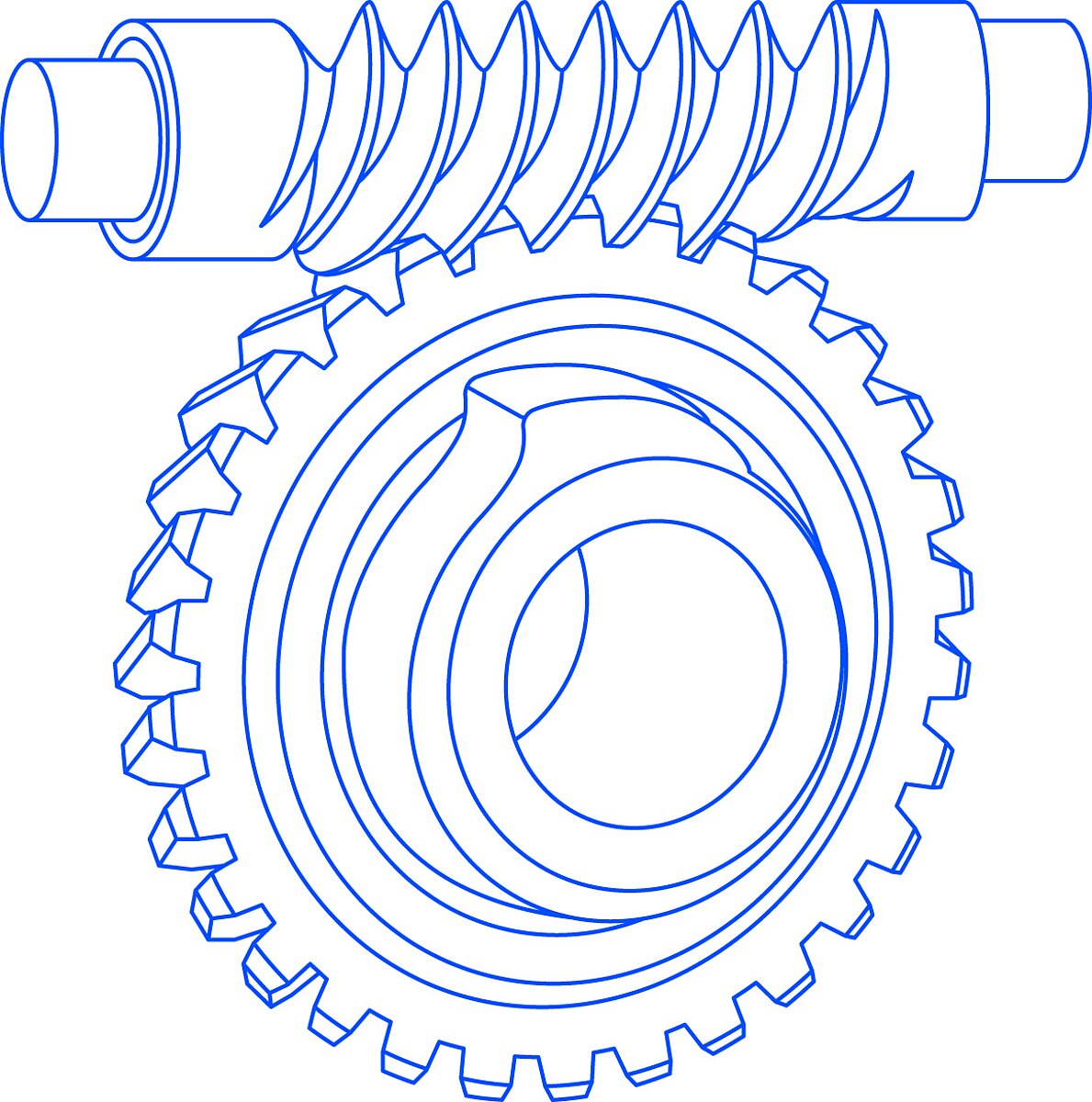
皮带齿轮 (Belt Gears)
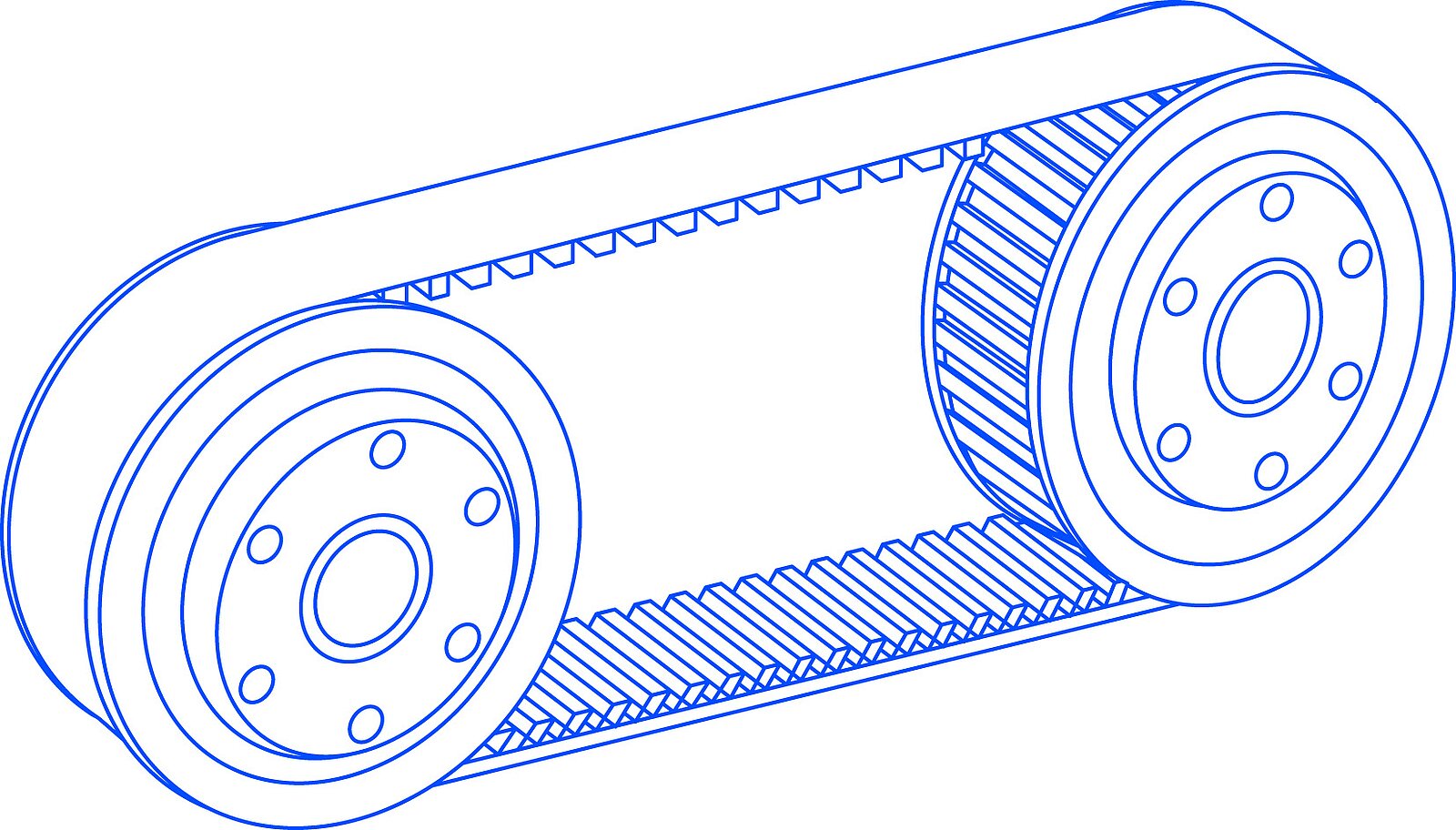
皮带传动装置由两个通过皮带相互连接的齿轮组成。采用这种方式,可以连结更大的轴距并实现更高的圆周速度。维护任务通常涉及皮带更换或皮带应力恢复。皮带限制了温度范围。产生的拉力和推力通常会导致较大的轴负载。PI通常在紧凑型定位平台中使用皮带齿轮;例如,驱动器在侧面“折叠”的Z向平台或线性平台。皮带传动装置适用于真空度高达10-6 百帕的应用。
锥齿轮 (Bevel Gears)
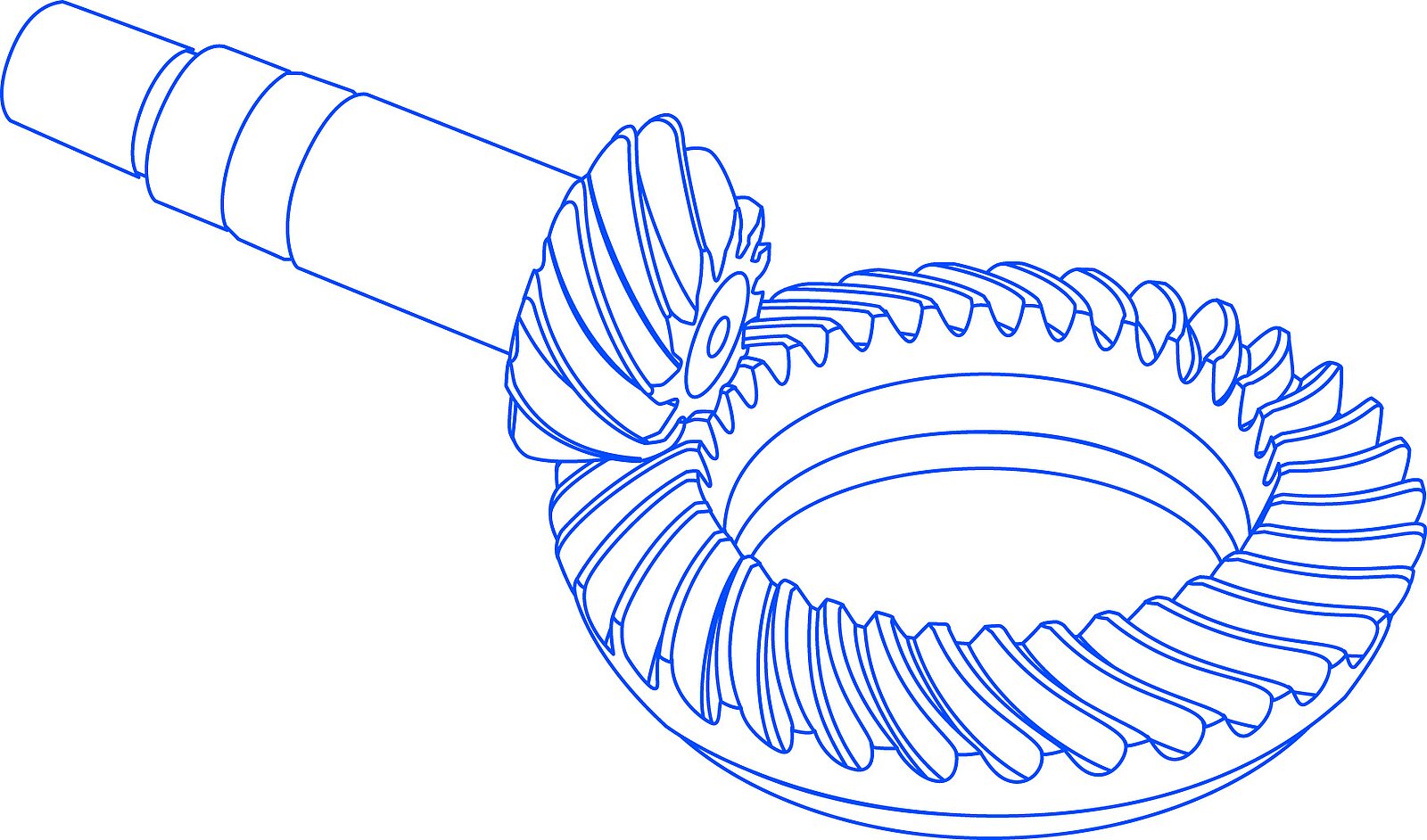
如图16所示的锥齿轮由一个小锥齿轮和一个带有相应成角度齿的齿轮组成。与蜗轮类似,能量以直角传递,但能够实现更高的扭矩容量。只有采用额外的正齿轮平台才能实现高传动比。产生的滚动接触是有利的。这使得锥齿轮比蜗轮齿轮磨损更低且效率更高。然而,锥齿轮往往更为昂贵。PI在定制的转台中部署锥齿轮。
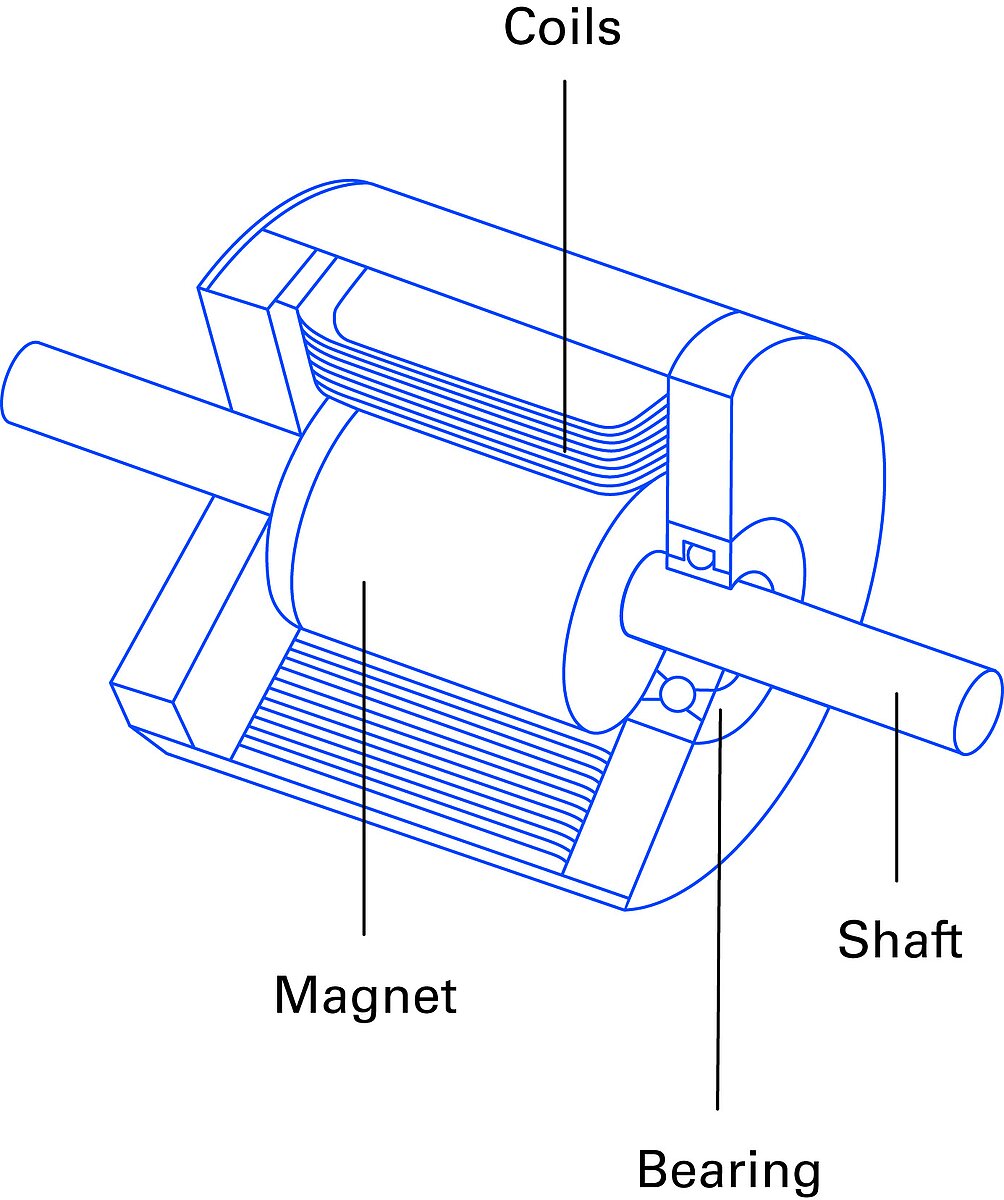
无刷直流电机(BLDC)/同步伺服电机(SSVM) (Brushless DC Motor (BLDC) / Synchronous Servo Motor (SSVM))
得益于其无刷换向,与有刷直流电机相比,BLDC(无刷直流电机)和SSVM(同步伺服电机)分别具有多种优点:
- 数万小时后,使用寿命主要受到轴承和端部的限制。因此,电机更为可靠。
- 无刷型号可以在提供相同性能的同时实现更小巧、更轻便、更高效和低维护的设计。其结果是获得较大的扭矩与电机尺寸比。
- 电子换向允许在低温下实现高动态性,同时振动较小。
这些正是在工业应用中优先选择BLDC和SSVM而非直流电机的原因。
电容基本负载(内部) (Capacitive Base Load (Internal))
对于开关式放大器。即使在没有连接电容负载(压电陶瓷促动器)的情况下,也能稳定输出电压。一个压电陶瓷控制器/驱动器的可能输出功率取决于内部和外部电容负载。
电容传感器 (Capacitive Sensor)
电容传感器允许非接触式测量,不会将过多能量引入压电驱动系统并采用扁平化设计。其直接位置测量消除了漂移对从10微米到约2毫米行程范围的影响。设计包括两个导电表面:高频交流电在两个表面之间产生均匀电场。涵盖定位平台、传感器技术和电子器件的总体系统在性能和精度方面均有所提升。半导体行业的客户也青睐于这种小型和多功能设计以及系统中无热量积聚。
请参见 >> 传感器线性化。
电荷控制的压电放大器 (Charge-Controlled Piezo Amplifier)
放大器的功能原理基于电荷控制。施加的电压控制传递至压电陶瓷促动器的电荷量。其结果是压电陶瓷促动器在高动态操作中具有高度可重复的线性位移,而无需额外的位置测量。与压控放大器一起工作时,压电陶瓷促动器显示的典型迟滞仅为2%左右。
建议监测压电陶瓷温度,以保护压电陶瓷促动器免受过高温度的损坏,特别是在高动态应用中。
闭环操作 (Closed-Loop Operation)
集成的位置允许电机可以闭环模式运行。测量到达的指定和实际位置并相互比较。控制技术用于到达合适的目标位置,从而实现较高的位置分辨率、均匀的进给速度以及更大的动态速度和加速度范围。
坐标系 (Coordinate System)
六足位移台运动平台的位置指标、运动方向和旋转中心由该坐标系确定。坐标系始终为右手坐标系。
为了能够使运动轨迹完全适应应用的要求,可定义与工件或工具位置等相关的各种坐标系。
交叉滚柱导轨 (Crossed Roller Guide)
交叉滚柱导轨的刚度相对较高,并且对低预载荷进行控制。其结果是摩擦力低、负载能力高、导向精度高且运转平稳。额外的强制保持架控制有助于防止滚柱轴承蠕变。然而,这缩短了在相同轴长度上可能的行程。
串扰 (Crosstalk)
与垂直于运动方向的轴上的理想运动存在偏差。
角度误差为xrx = θX = 侧倾角,xry = θY = 倾斜角,xrz = θZ = 偏转角。
轴向跳动的线性误差偏差,例如xty = 直线度,xtz = 平面度。
请参见 >> 线性误差。

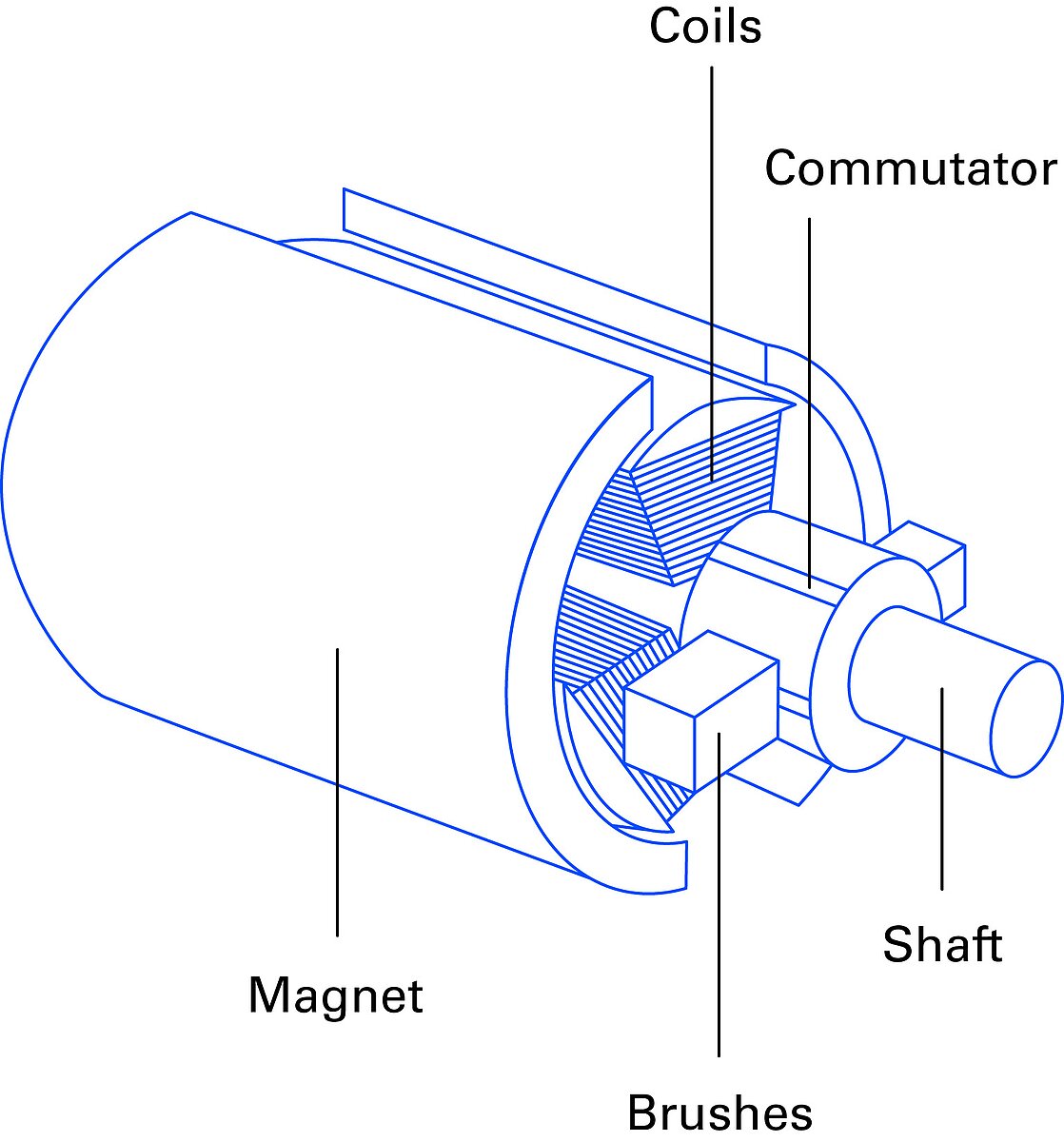
直流电机(DC) (DC Motor (DC))
直流电机在低速时提供高扭矩,在宽速度范围内提供良好的动态性能,并可以实现快速响应、低发热以及平稳无振动的运行。例如,在定位解决方案中,1毫米/转的丝杠螺距会导致典型的行进速度约为50毫米/秒。然而,由于将使用寿命限制在1,000至5,000小时之间,用于电机换向的易磨损电刷可能是其劣势之一。
在真空中的应用仅可高达10 -6 百帕,否则碳刷换向所需的湿度不足。此外,电刷会散出碳尘;因此在真空应用、无尘室和光学应用中会产生问题。
设计分辨率 (Design Resolution)
可进行理论最小运动。设计分辨率不得与最小位移混淆。在间接位置测量方法中,丝杠螺距、传动比、电机或传感器/编码器分辨率的值均包含在分辨率计算中;通常它大大低于机械部件的最小位移。在直接测量方法中,传感器系统的分辨率是被指定的。
直接计量 (Direct Metrology)
以很高的精度直接在运动平台上进行位置测量,因此非线性效应、机械作用或弹性形变不会对位置测量造成影响。这是通过非接触式光学线性编码器实现的。精密定位系统采用不同的编码器类型作为位置传感器:具有不同精度等级的增量式编码器、当机器再次接通时无需额外参考的绝对测量编码器以及面向2毫米以下行程的电容式传感器。

电容 (Electrical Capacitance)
技术数据表中列出的压电电容值均为小信号值(在1伏、1000赫兹、20摄氏度和空载的情况下测得的值)。室温下的大信号值要比小信号值高出1.3至1.6倍。压电电容随振幅、温度和负载的变化而变化,在室温下可高达空载、小信号电容的200%。有关电源要求的详细信息,请参见为压电驱动器和控制器提供的放大器频率响应曲线。
能量回收 (Energy Recovery)
带脉冲宽度调制(PWM)的开关式放大器(D类)用于控制压电输出电压。当压电陶瓷促动器放电时,用于能量回收的电路将部分返回能量储存在一个电容器里,从而使得这部分能量可重复用于下一个充电循环。与线性压电放大器相比,该放大器可将功耗降低高达80%,并且运行温度更低、稳定性更好。采用能量回收的压电驱动器是高动态扫描和开关式应用的理想选择。
EtherCAT现场总线接口 (EtherCAT® Fieldbus Interface)
EtherCAT(用于控制自动化技术的以太网)是一种基于以太网的开放式实时运行的现场总线系统。EtherCAT是德国倍福自动化有限公司(Beckhoff Automation GmbH)的注册商标和技术。
PI的六足位移台控制器支持EtherCAT。并联运动所需的坐标变换由六足位移台控制器实现,并且不会对PLC造成不良影响。
齿轮电机 (Gear Motors)
齿轮电机用于准确定位任务,以便在更低的速度下提供更高的扭矩和更高的分辨率。在慢速应用中,得益于齿轮比,转子的运动速度相对较快。如果不使用齿轮,则由于转子速度较低,可能会出现不希望的齿槽转矩。此外,齿轮支撑垂直应用中的保持力。通常情况下,控制回路只需较小的力,因为由于采用了减速齿轮,电机仅承受运动平台上的负载,而该负载按传动比的平方减少。
然而,齿轮传动电机不是无间隙的,并且附加的摩擦会降低效率。因此,齿轮制造商通常会采取合适的润滑以保证预期的使用寿命。使用寿命主要取决于输入速度和输出扭矩以及运行、环境和安装条件。在定制解决方案中,可通过自润滑轴承、滚珠或陶瓷轴承、金属齿轮和专用润滑脂延长使用寿命。
严格地说,传动螺杆也可以用作齿轮主轴定位系统中的齿轮,因为依赖于主轴间距以扭矩为代价实现了速度调整。为此,与1毫米/转的主轴间距相比,当主轴间距为2毫米/转时,运动平台以50%的扭矩移动的速度是原来的两倍。然而,对于某些应用来说,在电机与传动螺杆之间需使用真正的齿轮。PI为此方案部署了各种齿轮类型。
ID芯片 (ID Chip)
ID芯片位于许多压电平台的连接器中。使用数字控制器在工厂内校准平台时,校准数据与特定产品信息被同时保存在ID芯片上。接通电源后,数字控制器从已连接平台的ID芯片上读取数据。如果平台的ID芯片包含校准数据,则其可被连接至任何合适的数字电控,无需重新校准。
增量编码器 (Incremental Encoder)
当增量编码器处于运动状态时,会产生由控制器计数的脉冲。然而,与绝对编码器相比,这是一个确定相对位置的问题。为了确定绝对位置,还必须参考限位开关或参考开关信号。
最大侧向力 (Lateral Force, Max.)
垂直于定位方向的最大侧向力。对于压电系统来说,侧向力受压电陶瓷促动器和柔性铰链设计的限制。对于XY位移平台而言,相应正交模块的推/拉力容量(在其定位方向上)限制了可以接受的侧向力。
线性放大器/驱动器 (Linear Amplifier / Driver)
大多数压电驱动器使用线性放大器(AB类)来产生输出电压。在开环(电压控制)压电模式下,由可选地与直流偏移相结合的模拟输入信号控制放大器输出电压。
线性电机 (Linear Motor)
线性电机是一种可产生直线运动的电磁直接驱动器。线性电机的范围几乎是无限制的。线性测量系统始终是运动和定位所必需的;线性电机的开环操作无法完成此类任务。与伺服电机相同,线性电机无需机械耦合元件来将电机的旋转运动转换为线性运动。通常情况下,使用三相电动机。
典型应用包括电子和半导体工业、医药和生物技术、机床(主要集中在激光切割方面)以及精度、动力学和生产率都很重要的其他领域。
NEXACT® 压电陶瓷步进驱动器 (NEXACT® Piezo Walking Drive)
精密压电电机,通过压电陶瓷弯曲元件移动动轮。这类驱动器非常紧凑,可实现10毫米/秒左右的相对较高的速度以及高达10牛的力。适当选择压电陶瓷元件可优化相应应用的步长、夹持力、速度和刚性。
开环操作 (Open-Loop Operation)
使用不带位置传感器的促动器或电机。开环操作特别适用于响应时间短、分辨率非常高且要求最大带宽的应用。这种情况下,以绝对值的形式控制或读取目标位置要么不重要,要么由外部位置传感器执行。
压电陶瓷促动器的位移大致对应于驱动电压;仍然无法借助于开环控制补偿蠕变、非线性和滞后。
对于直线电机和音圈驱动器等电磁直接驱动器来说,无法进行开环操作。
并联运动,六足位移台 (Parallel Kinematics, Hexapods)
六足位移台是带有六个可直接连接到单一平台的驱动器的并联运动系统。这使得用户可以在X、Y、Z和旋转方向的所有自由度中自动定位物体,并且取决于驱动器,具有微米量级或更低的精度。并联运动系统非常富有刚性,借助于只有很低的被动重量才能移动以及相应的设计,可承载高达数吨的负载。用户可以任意选择参考坐标系,当今,工人们正在生产线上与六足位移台协同工作。用户通过EtherCAT将系统集成到自动化环境中。

并联运动压电平台 (Parallel-Kinematic Piezo Stages)
压电平台通过采用电容传感器的并联运动装置达到理想的轨迹精度,从而实现并联测量。在多轴并联运动系统中,所有促动器均直接作用于一个运动平台。这意味着所有轴均移动相同的最小质量,并且可以为其设计相同的动态特性。并联运动系统比串联堆叠系统具有更多的优点,包括更紧凑的结构以及各轴无累积误差。配备直接计量的多轴纳米定位系统能够针对一个共同参照在所有自由度上测量平台位置。在此类系统中,能够立即检测到一个促动器在另一(串扰)方向上的非期望运动,并由伺服回路主动补偿。即使在动态操作中,这一主动轨迹控制概念也能够将轨迹偏差保持在几纳米以下。
PICA/PICA Power
PICA压电陶瓷促动器专为高占空比应用而设计。PICA Power促动器还针对高温工作条件进行了额外优化。
所有使用的材料均经过特殊匹配,以确保鲁棒性和使用寿命。PICA驱动器的耐久性试验已证明了一致的性能,即使在数十亿(1,000,000,000)次循环后依然如此。高位移和低电容的组合提供了出色的动态行为,同时降低了驱动功率要求。
PICMA® 多层压电陶瓷促动器 (PICMA® Multilayer Piezo Actuators)
PICMA促动器利用间接压电效应,并在相对较低的电压下实现较大的力。它们只需要少量的安装空间。同时,PICMA促动器动力十足,可以达到前所未有的精度。这就是它们在计量技术中用作微泵应用的原因。由于采用陶瓷绝缘材料,PICMA促动器具有高可靠性和耐气候性。PI还为PICMA促动器配备了适合客户应用程序的独立连接器。
PICMAWalk
PICMAWalk驱动器可实现高达50牛的进给力和高达60牛的保持力。最大速度为15毫米/秒。PICMAWalk采用久经考验的PICMA多层压电陶瓷促动器。这意味着将压电控制电压降至120伏。PICMA压电陶瓷促动器还可确保较长的使用寿命和PICMAWalk技术杰出的稳定性。
压电惯性驱动器 (Piezoelectric Inertia Drive)
压电陶瓷惯性驱动器为空间节约型且价格实惠的基于压电陶瓷的驱动器,其保持力相对较大,行程在理论上几乎是无限的。最大工作频率为20千赫兹时,驱动直接作用在动轮上,实现超过5毫米/秒的速度。在20kHz的工作频率下,Q-Motion驱动器运行时静音。驱动器在静止状态下可自锁,无需电流,且不产生任何热量。其能用最大的力保持住位置。因此,在负载循环次数较少时,它适用于电池供电的移动应用。
PiezoMove®
PiezoMove®促动器将行程长达1毫米的导向运动与供选配的精度高达10纳米的传感器相结合。高精度、无摩擦的柔性铰链导向可实现非常高的刚度以及非常低的横向位移。
这使其比简单的压电陶瓷促动器更易操作,但仍然保持结构十分紧凑。所用压电陶瓷促动器的数量和尺寸将确定刚度和力的生成。正因这些特点以及其小尺寸和经济划算的设计,PiezoMove®杠杆促动器尤其适用于OEM应用。
PiezoWalk® 步进驱动器 (PiezoWalk® Walking Drive)
PiezoWalk驱动器利用压电步进原理,将亚纳米级分辨率与较大的力、稳健的设计和可扩展的行程相结合。行业客户使用步进驱动器,可实现大于1毫米的行程,并以纳米精度的分辨率保持稳定的位置。PI (Physik Instrumente)提供具有高进给力以及定位和保持力的步进驱动器,同时具有相对较高的速度,并且驱动器在真空中也具有较长的使用寿命。
请参见 >> NEXLINE®、 >> NEXACT®和 >> PICMAWalk。
PIglide空气轴承技术 (PIglide Air Bearing Technology)
PIglide空气轴承技术可实现无摩擦定位,在超过100毫米的范围内具有高达5微弧度的高导向精度。这项技术提高了位置分辨率,并可实现恒速扫描。重复精度只是少量编码器脉冲。使用柔性铰链导向压电纳米定位器,也可以在纳米范围内获得类似精度,然而这仅限于非常短的行程。
PILine® 超声波压电电机 (PILine® Ultrasonic Piezomotors)
PILine超声波压电电机精度高、动态、小巧、无噪音且自锁。因此,无需在静止时为其供应电流,而这反过来又降低了应用的能量需求。出于这个原因并且由于其尺寸小,这些驱动器尤为适用于光学工业中的移动设备和测量技术,从而可以取代传统的驱动技术。
PIMag® 音圈 (PIMag® Voice Coil)
音圈驱动器重量轻、体积小并且基于无摩擦驱动原理,因此特别适合在有限行程内要求高动态性和高速度的应用 - 例如,在医疗技术中。与传统的基于传动螺杆的解决方案相比,音圈驱动器为客户带来了更大的优势,尤其在磨损和动力学方面更是如此。这类驱动器还可提供高扫描频率和精密定位,因为它们不存在磁滞效应。
请参见 >> 音圈驱动器。
行星齿轮 (Planetary Gears)
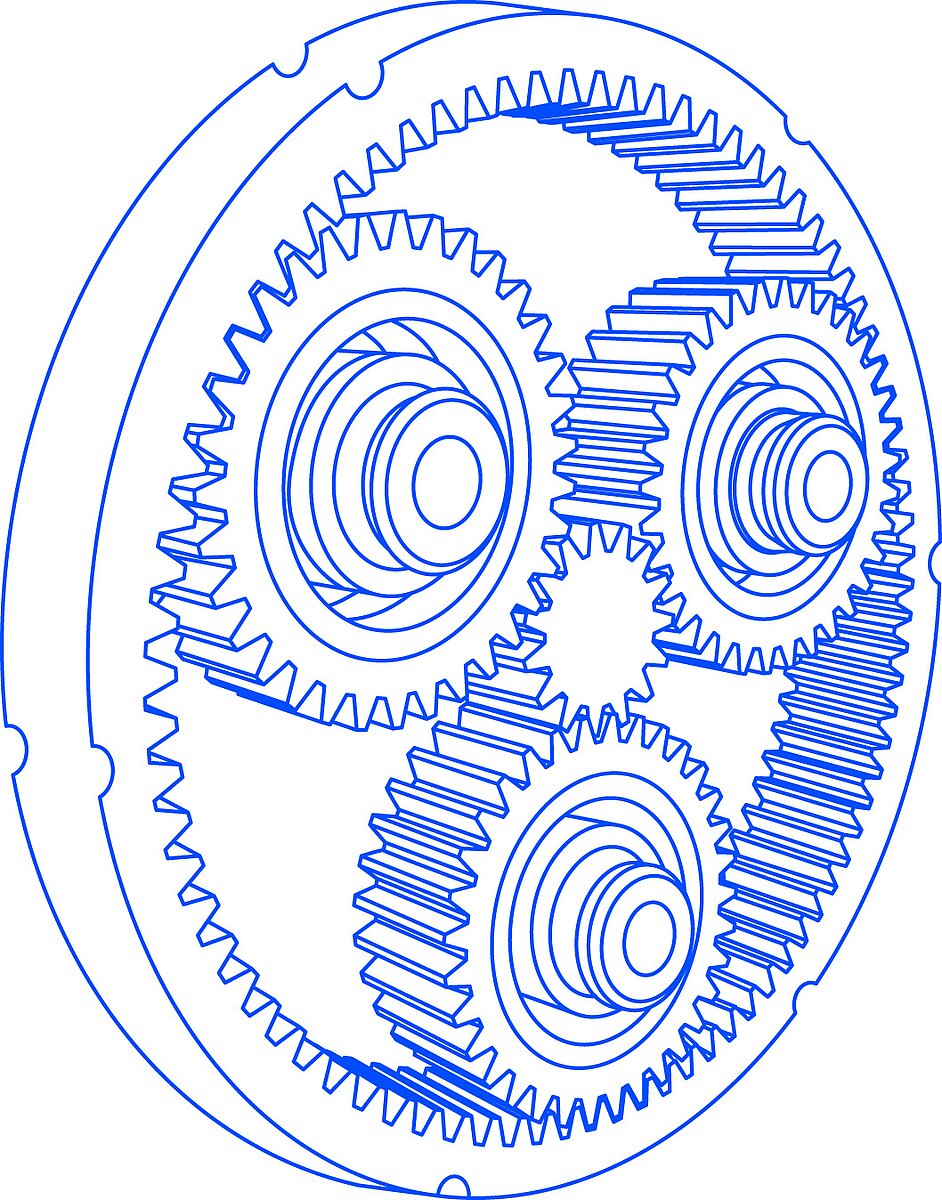
行星齿轮由连接到轴的中心太阳轮以及位于环形轮内的其他行星轮组成。由于通过几个齿轮分配负载,行星齿轮适合传递高扭矩。采用这种方式,可以在非常紧凑的装配空间中实现高传动比。为降低高速噪声,输入平台的齿轮通常由合成材料制成。对于真空、高温或非常高扭矩的应用,输入平台最好由钢制成。除正齿轮外,行星齿轮通常也用于PI线性平台中的齿轮电机。
预载压电陶瓷促动器 (Preloaded Piezo Actuator)
压电堆叠促动器由内部预载保护。预载确保在任何应用场景下都能安全运行,是动态应用和拉伸载荷的理想选择。预载压电陶瓷促动器旨在集成到客户的系统中,并且无导向。如果无法接受单个轴上的运动串扰,则需要外部导向。
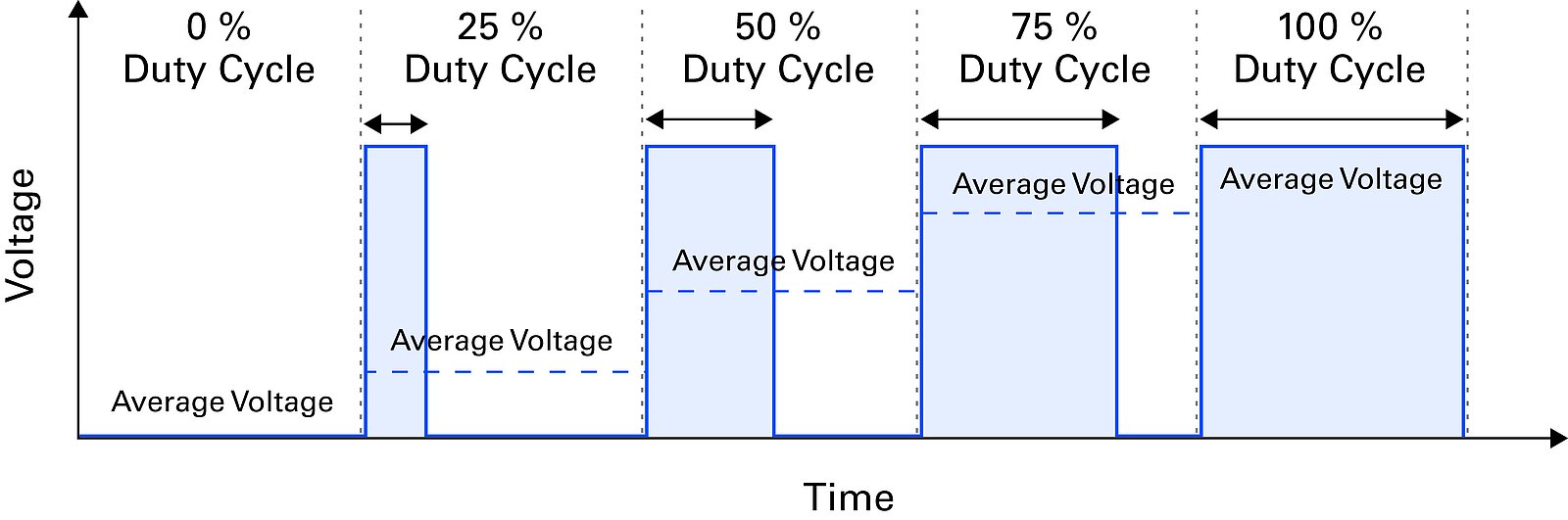
脉冲宽度调制(PWM) (Pulse Width Modulation (PWM))
PWM控制的电机可通过高频信号控制(电机)性能。这意味着功率信号可以与数字控制信号相分离。
PWM控制器与高性能开关式放大器一起用于压电陶瓷促动器,或者用于控制线性电机或音圈驱动器等电机。 >> ActiveDrive电机是PI的一项专有功能,请参见此处。
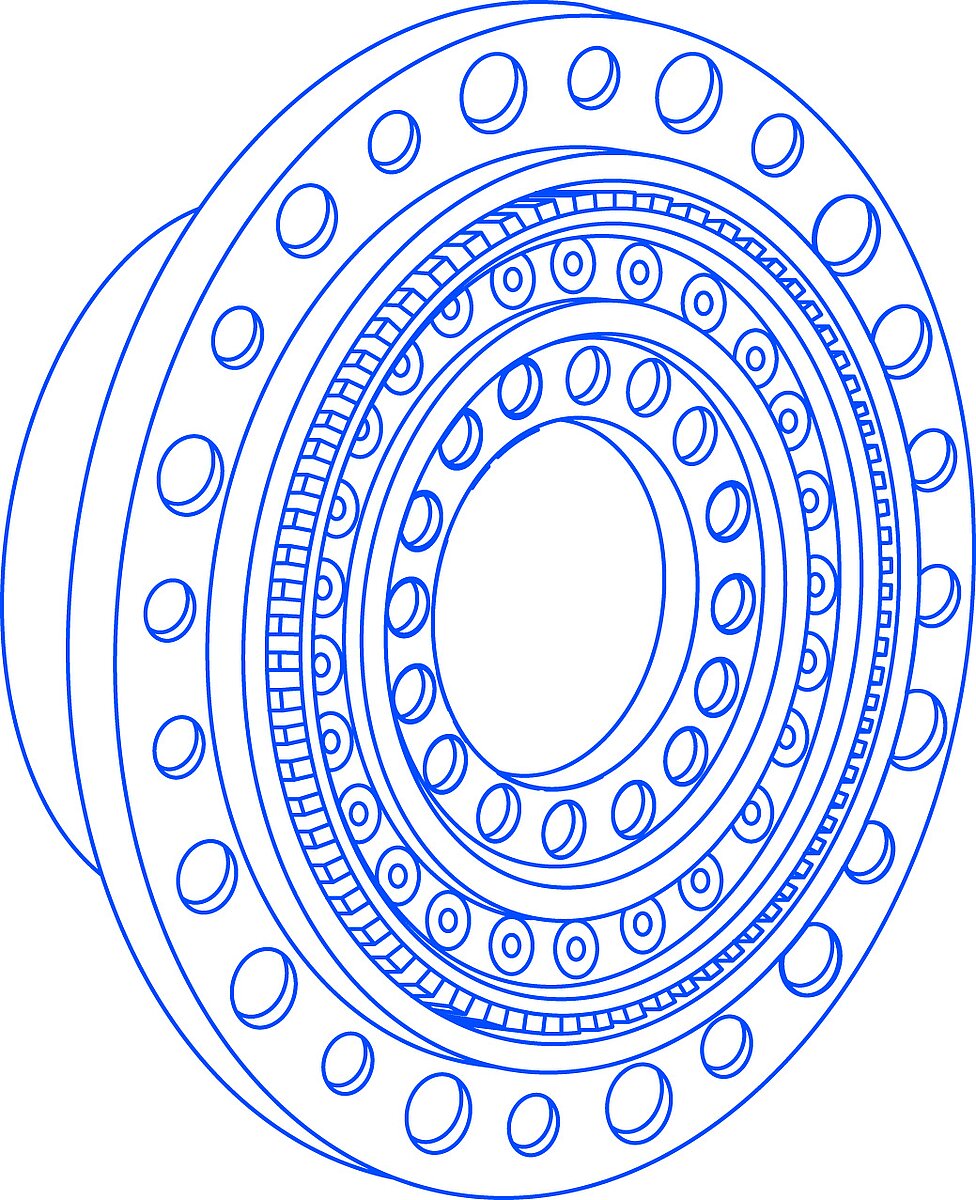
循环滚珠轴承导轨 (Recirculating Ball Bearing Guide)
得益于其设计,循环滚珠轴承已经对蠕动不敏感。例如,它们适用于通常用于扫描较小区域的高精度轴。正确组装后,它们可提供高负载能力,同时使用寿命明显延长、无需维护并提供高导向精度。
分辨率 (Resolution)
位置分辨率涉及测量装置仍能检测到位移的微小变化。由于不受静态或滑动摩擦的影响,基于压电的定位系统和压电陶瓷促动器的分辨率基本无限制。相反地,相当于指定了电控噪声。值为典型结果(均方根,1σ)。
传感器分辨率 (Sensor Resolution)
所采用测量系统可检测到的最小可计算增量。旋转编码器:每个螺丝旋转的计数。线性编码器:传感器系统能检测到的最小增量。传感器可为位置分辨率的决定性因素,因此可能需要单独指定传感器分辨率。
请参见 >>设计分辨率。
串联运动 (Serial Kinematics)
多轴运动系统的堆叠或嵌套装置。每个促动器均驱动其各自的平台。促动器和运动轴是彼此唯一指定的。因此,可以比较轻松地组装和控制多根轴相。动态特性取决于各个轴。与 >>并联运动相比,任何导向误差累积和整体导向精度都较差,请参见此处。
伺服电机 (Servo Motor)
带位置检测和控制的电机称为伺服电机。电机本身通常为直流电机。伺服电机在低速时提供高扭矩,在宽速度范围内提供良好的动态性能,并可以实现快速响应、低发热以及平稳无振动的运行。旋转编码器或绝对编码器均用于检测位置。伺服放大器负责放大信号并控制电机参数。这通常是带有附加滤波器的PID(比例、积分、微分)控制器,以便尽可能地利用上述特性。
请参见 >>无刷直流电机、 >>直流电机(DC)。
SpaceFAB设计 (SpaceFAB Design)
SpaceFAB为部分并联运动设置,具有恒定的支撑长度和特别带接装板或支架(作为选配件提供)的多轴系统装置低的轮廓。SpaceFAB中的每个XY线性平台布置驱动三个单独的支撑腿。机械布局允许非对称设置,例如,在所需运动方向上的较长行程。
规格 (Specifications)
在发货之前请检查性能规格。并非所有规格都可以组合。性能规格适用于室温(22 ±3摄氏度),并且在该温度下校准闭环操作中的系统(根据要求针对不同工作温度的规格)。在相当低或高的温度下运行时,可能需要重设操作参数。可根据要求定制超低温或超高温设计。
正齿轮 (Spur Gears)
正齿轮由两个平行但尺寸不同的齿轮组成。由于设计简单,可以非常简单且稳健地制造正齿轮。由于其结构简单,正齿轮易于制造且坚固耐用。全金属型号满足均匀且平稳运行方面的高要求,尤其是对于需要在低扭矩下获得高精度的应用可实现无游隙型号。为实现此目标,通过齿轮系的反向扭转及其在电动机小齿轮上的张力来设置预载。除行星齿轮外,正齿轮通常也是PI线性平台中的标准选型齿轮电机。
步进电机,两相步进电机(2SM) (Stepper Motor, 2-Phase Stepper Motor (2SM))
步进电机在每一转中仅占离散位置。得益于其量化步进,与直流电机相比,步进电机仅提供减小的动量。高速只能通过以扭矩为代价的大量步进来实现,因为绕组需要相互通电以便设置中间步进。
步进电机可以针对真空型应用进行搭建,具有较长的使用寿命,并且无需编码器即可应用于定位任务。步进电机的开环操作不会引起位置抖动,因为抖动是由闭环操作中的反馈环路引起的。通常,以旋钮形式应用机械式阻尼器以增强平稳运行并抑制共振。
步进电机拥有不同的配置。
刚度 (Stiffness)
弹簧常数,非线性压电材料。定位器的静态大信号刚度是针对数据表中室温下的定位方向指定的。例如,由于压电材料的活动特性或复合效应引起的影响,小信号刚度与动态刚度可能有所不同。
应变片传感器(SGS) (Strain Gauge Sensor (SGS))
应变片传感器包括封装在箔片(SGS)或半导体箔片(PRS)上的细金属线,其附着于压电陶瓷促动器或柔性铰链定位器的导向系统(控制杆、柔性铰链)。由于运动平台的位置取决于控制杆、导向或压电陶瓷堆叠的测量,因此这种类型的位置测量是通过接触和间接方式完成的。应变片传感器从其膨胀和由此产生的电阻变化中获得位置信息。每轴带有多个应变片传感器的全桥电路提高了热稳定性。
螺纹滚柱传动螺杆 (Threaded Roller Drive Screw)
如果是螺纹滚柱传动螺杆,则传动螺杆、滚柱与螺母之间的接触面比滚珠丝杠传动大得多。这可以实现非常高的刚度和更高的负载。提供不同的版本,例如,无滚柱再循环的导向行星式滚柱或旋转滚柱,即具有滚柱再循环,从而允许甚至更小的螺距。
偏摆镜 (Tip/Tilt Mirrors)
例如,偏摆镜、快速倾斜镜和偏摆台用于有源光学元件以及激光加工和激光束偏转中的激光束偏转。这些特殊的压电平台主要提供两条具有公共旋转中心的正交偏摆轴。在具有共同的固定旋转中心且偏振方向无变化的的情况下,其并联运动设计使得两根偏摆轴上的性能保持一致。带宽、谐振频率和加速度通常高于采用音圈或振镜扫描仪的型号。由于在设计中采用了柔性铰链导向,倾斜镜可免受磨损。
真空兼容版本 (Vacuum-Compatible Versions)
在许多工业领域中,在真空中生产正日益变得更加重要。因此,PI (Physik Instrumente)为其客户提供各种不同的驱动技术,可在10–7 甚至10–10百帕的真空中运行。 这包括在强磁场和低温环境中工作的压电陶瓷促动器,行程低于1.5毫米且精度为亚纳米级的压电系统,在力、动力学和行程范围方面采用多种设计的压电电机以及采用特殊设计可实现更大行程的直流或步进电机的经典机动化。