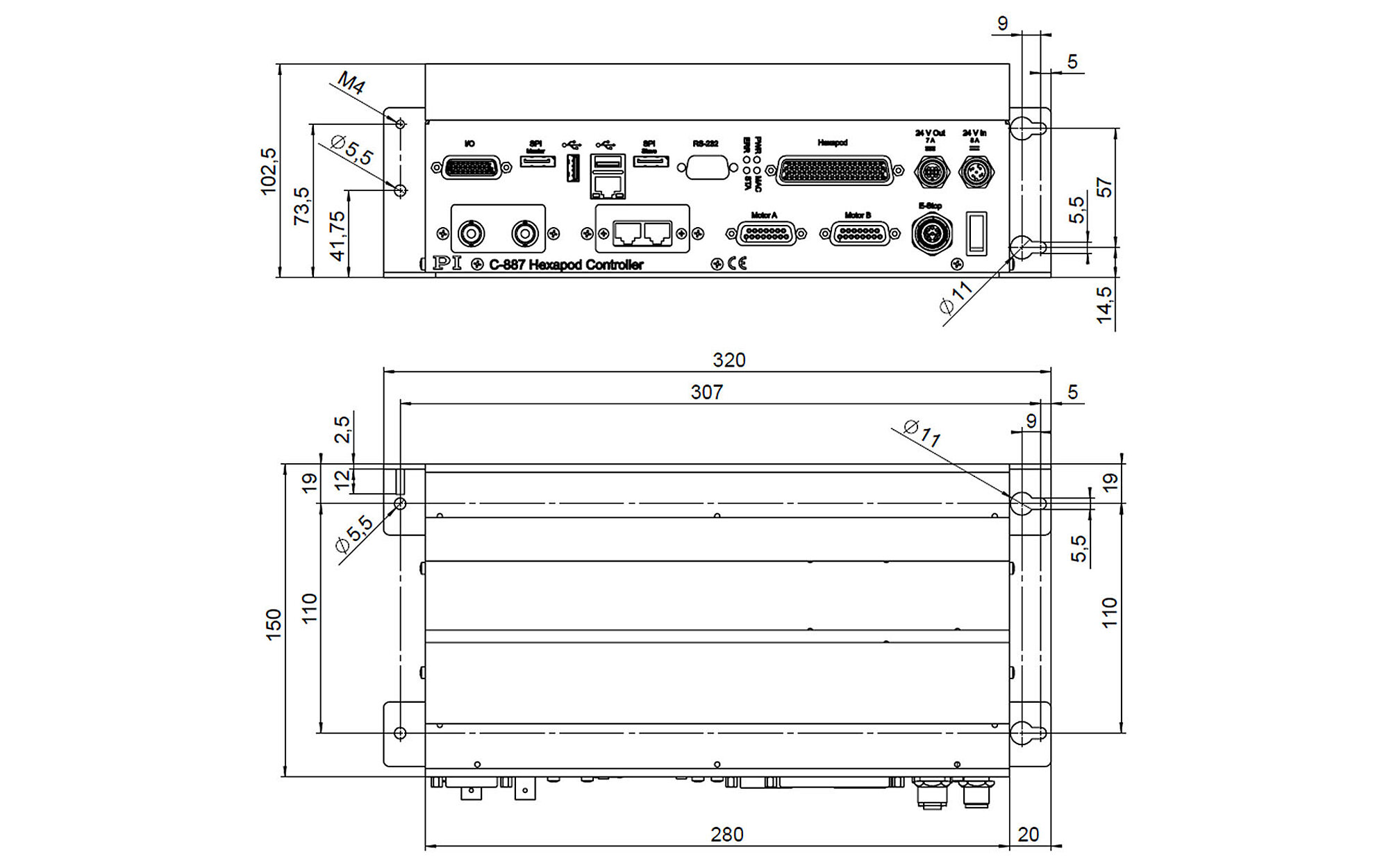
C-887.52
用于六足位移台的六轴控制器,TCP/IP,RS-232,台式设备,包含对两个附加轴的控制



带直流电机、用于六足位移台(六轴并联运动)的高性能数字控制器。利用集成ActiveDrive对两个附加单轴进行额外控制。
利用直角坐标系进行位置输入,控制器处理坐标转换。为了使六足位移台的集成简易化,参考系(工作,工具)可快速、轻松改变。实时操作系统可防止抖动,从而保证响应时间始终很短。稳定、虚拟的枢轴点可在空间内自由定义。数据记录器用于记录工作数据,如电机控制、速度、位置或位置误差。宏编程。自动运行的宏可实现独立操作。控制器带BiSS接口,可支持电机制动器和绝对测量传感器。
TCP/IP可实现远程控制和维护。RS-232、USB连接可用于外部输入设备(人机接口设备)。
PIMikroMove用户软件。用于所有PI定位系统的通用指令集。全套驱动器用于与NI LabVIEW联用。图形用户界面输入接口、配置软件和以图形方式显示的扫描子程序。
请与合适的六足位移台机械部件一起下单购买。发货范围包含六足位移台、带软件包的控制器、成套电缆和电源适配器。
接口和操作 | C-887.52/C-887.521/C-887.522/C-887.523 |
|---|---|
通信接口 | TCP/IP、RS-232 USB(人机接口设备、手动控制单元) |
六足位移台连接 | 用于数据传输的HD D-sub 78针(母头) 用于电源的M12 4针(母头) |
单轴连接器 | D-sub 15(母头) |
输入/输出线路 | HD D-sub 26针(母头): 4路模拟量输入(-10至10伏,通过12位模数转换器完成) 4路数字量输入(TTL) 4路数字量输出(TTL) |
模拟输入 | 仅C-887.521和C-887.523: 2路视频输入/输出,-5至5伏,通过16位模数转换器完成,带宽为5千赫兹 |
运动停止输入 | 仅C-887.522和C-887.523: M12 8针(母头) |
指令集 | PI General Command Set (GCS) |
用户软件 | PIMikroMove |
应用程序编程接口 | API用于C / C++ / C# / VB.NET / MATLAB / Python,驱动器用于NI LabVIEW |
手动控制 | 选配件:用于六足位移台的C-887.MC2手动控制单元 |
PI Simulation Models for CoppeliaSim / V-REP
C-887.MC2 Manual Control Unit
C-887六足位移台控制器,型号C-887.52、C-887.521、C-887.522、C-887.523、C-887.53、C-887.531、C-887.532、C-887.533
PI六足位移台仿真工具。确定六足位移台的工作区和允许负载。
六足位移台的运动。空间中的位置和方向,旋转中心。
六足位移台微型机器人坐标系统说明
快速多通道光子学对准。用于硅光子学生产中的快速光学对准的硬件和固件。
Description of PIHexapodEmulator software
用于碰撞检查的C-887.VM1 PIVeriMove软件说明
C-887.MC六足位移台控制单元说明
Updating PI Software with PIUpdateFinder
GCS阵列数据格式
PIMikroMove
PI GCS2 DLL
PI MATLAB驱动器GCS 2.0
用于编辑PIStages3 数据库的PIStages3Editor
PIStages3数据库的信息。将PIStages2转换成PIStages3时必须考虑的事项。
PIPython - 使用Python编程PI控制器
在TwinCAT 3.1中实现C-887 PI控制器,用于运动和坐标系激活
PI GCS2 Driver Library for NI LabVIEW
PI Software on ARM-Based Platforms
PIVirtualMove. Simulation program for parallel-kinematic multi-axis systems
Updating controller firmware with PIFirmwareManager
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。所有线上有货的产品均可直接订购。