S
Scan-Routine
Schleppkettentaugliches Kabel
Schneckengetriebe
Schrittmotor, 2-Phasen Schrittmotor (2SM)
Sensorauflösung
Sensorbandbreite
Sensor-Linearisierung
Serielle Kinematik
Serielle Metrologie
Servomotor
Sinnvolle Piezolast
Software
SpaceFAB Design
Spezifikationen
Spitzenstrom
Steifigkeit
Stirnradgetriebe
Stromaufnahme
Strombegrenzung
Synchron-Servomotor (SSVM)
Scan-Routine
Algorithmus, der eine Bewegungssequenz ausführt und mit dem die zugehörigen Daten ausgewertet werden können; z.B. Suche nach einem optimierten analogen Eingangssignal.
Beispiele sind >> Flächenscan und >> Gradientensuche.
Schleppkettentaugliches Kabel
Schleppkettentaugliche Kabel finden in Energieführungsketten Anwendung. Sie bleiben funktionsfähig, obwohl sie während ihrer Lebensdauer einer großen Anzahl von Biegezyklen ausgesetzt sind.
Schneckengetriebe
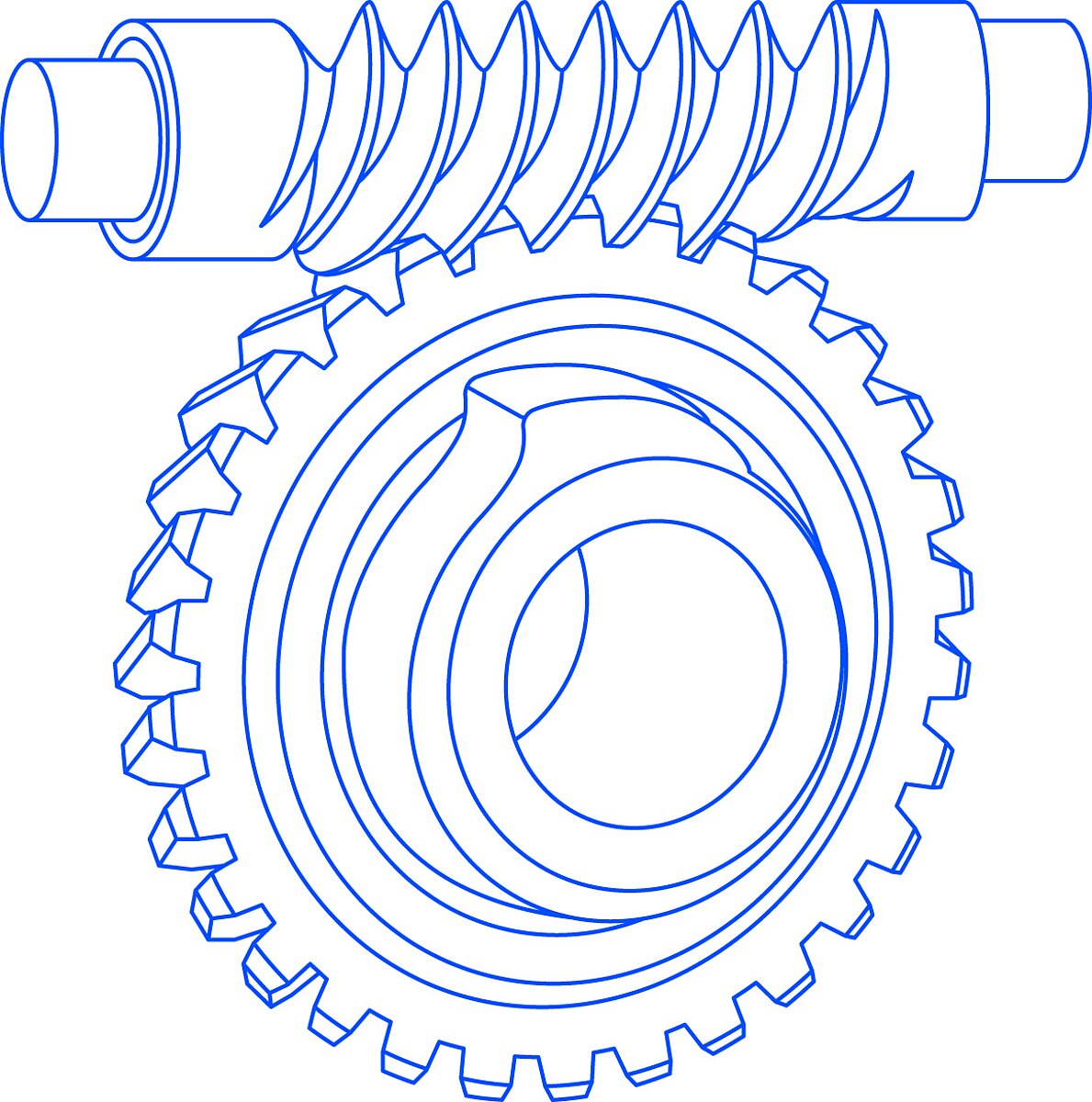
Schneckengetriebe bestehen aus einer Welle mit Schneckengängen und einem Schneckenrad. Die Kraft wird im rechten Winkel mit Gleitreibung übertragen. Deshalb hat die Schneckenwelle eine hohe Selbsthemmung, sodass für bestimmte Anwendungen keine zusätzliche Bremse erforderlich ist. Die Gleitreibung verursacht aber einen niedrigen Wirkungsgrad, hohen Verschleiß und unter Umständen eine hohe Temperatur. Typischerweise kann mit Schneckengetrieben bereits mit einer Stufe eine hohe Übersetzung erreicht werden, was sie vergleichsweise günstig macht. PI setzt oft Schneckengetriebe für Rotationstische, weil diese Bewegungen im rechten Winkel übertragen. So kann der Motor seitlich am Rotationstisch ausgerichtet werden.
Schrittmotor, 2-Phasen Schrittmotor (2SM)
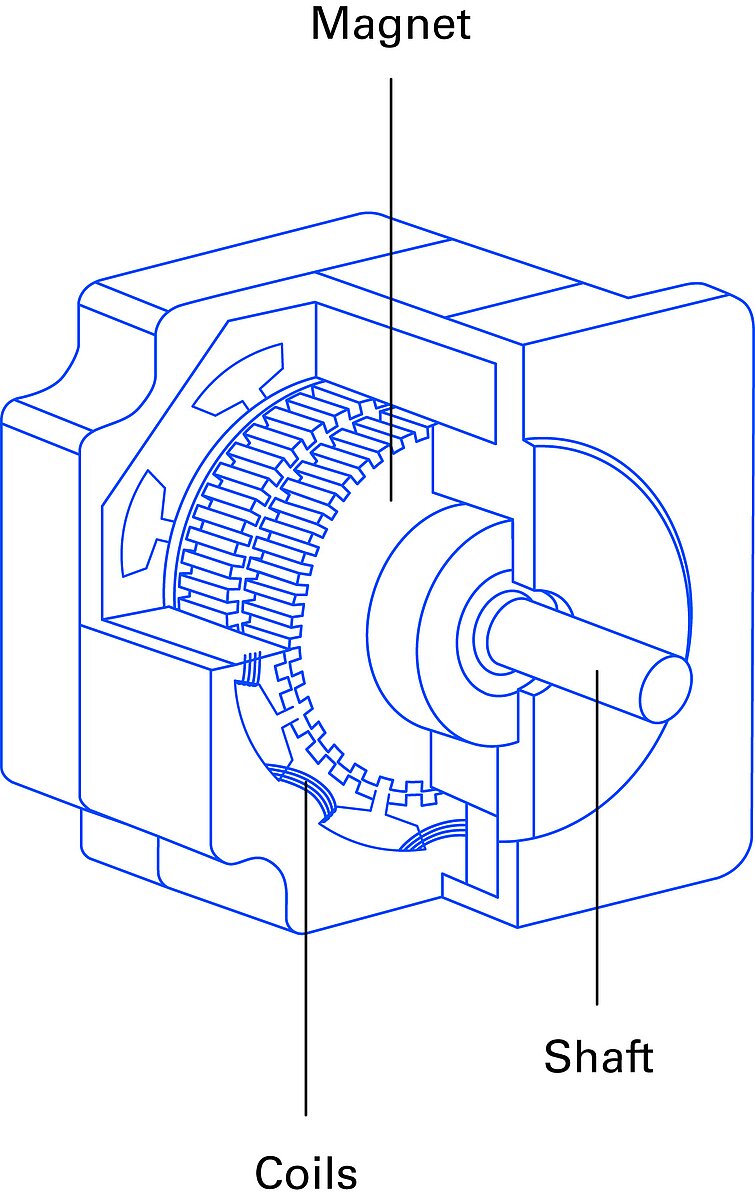
Schrittmotoren nehmen nur diskrete Positionen innerhalb einer Umdrehung ein. Aufgrund der quantisierten Schritte bieten Schrittmotoren eine geringere Dynamik als DC-Motoren. Hohe Drehzahlen lassen sich nur über eine hohe Schrittzahl auf Kosten des Drehmoments realisieren, da für die Einstellung der Zwischenschritte Wicklungen teilweise gegeneinander bestromt werden müssen.
Schrittmotoren können vakuumtauglich realisiert werden, besitzen eine hohe Lebensdauer und können auch ohne Encoder zur Positionierung eingesetzt werden. Durch einen Betrieb im offenen Regelkreis entsteht außerdem kein Positionsjitter durch die sonst vorliegende Regelung. Zur Erhöhung der Laufruhe bzw. zur Resonanzunterdrückung wird oft ein mechanischer Dämpfer eingesetzt, der als Handrad verwendet werden kann.
Schrittmotoren gibt es in unterschiedlichsten Bauformen.
Sensorauflösung
Kleinstes Inkrement, das rechnerisch vom verwendeten Messsystem detektiert werden kann. Rotationsencoder: Anzahl der Impulse pro Spindeldrehung. Linearencoder: Kleinstes Inkrement, das vom verwendeten Sensorsystem noch detektiert wird. Der Sensor kann für die Positionsauflösung ein kritisches Element sein, deshalb wird erforderlichenfalls die Sensorauflösung separat spezifiziert.
Siehe >> Rechnerische Auflösung.
Sensor-Linearisierung
Bei kapazitiven Sensoren zeichnet sich die Signalaufbereitung durch einen besonders niedrigen Rauschpegel aus. Das integrierte Linearisierungssystem (ILS) kompensiert die Einflüsse von Parallelitätsfehlern zwischen den Kondensatorplatten.
Serielle Kinematik
Gestapelter oder geschachtelter Aufbau eines Mehrachsen-Bewegungssytems. Jeder Aktor wirkt auf seine eigene Plattform. Aktor und Bewegungsachse sind einander eindeutig zugeordnet. Die Montage und die Ansteuerung mehrerer Achsen sind dadurch relativ einfach. Die dynamischen Eigenschaften hängen von der jeweiligen Achse ab. Eventuelle Führungsfehler summieren sich und die Gesamtführungsgenauigkeit ist schlechter als bei der >> Parallelkinematik, siehe dort.
Serielle Metrologie
Jeder servo-geregelten Bewegungsachse ist ein Positionssensor zugeordnet. Unerwünschtes Übersprechen (Crosstalk), oder Führungsfehler bleiben unbemerkt und unkorrigiert.
Siehe >> Parallelmetrologie.
Servomotor
Ein Motor mit Positionserfassung und –regelung wird als Servomotor bezeichnet. Beim Motor selbst handelt es sich oft um einen DC-Motor. Servomotoren bieten hohe Drehmomente bei geringer Drehzahl, eine gute Dynamik über einen großen Drehzahlbereich, schnelles Ansprechen, geringe Wärmeentwicklung sowie einen gleichmäßigen und schwingungsfreien Betrieb. Zur Positionserfassung werden beispielsweise Rotationsencoder oder Absolutencoder eingesetzt. Die Verstärkung des Positionssignals sowie die Regelung der Motorparameter werden von einem Servoverstärker übernommen. Dieser wird üblicherweise als PID-Regler (proportional, integral, derivativ) mit zusätzlichen Filtern ausgelegt, um die oben genannten Charakteristika bestmöglich auszunutzen.
Siehe: >> Bürstenloser DC-Motor, >> DC-Motor (DC).
Sinnvolle Piezolast
Für geschaltete Verstärker. Die mögliche Ausgangsleistung eines Piezocontrollers / Treibers hängt von den internen und externen kapazitiven Lasten ab.
SpaceFAB Design
SpaceFAB sind teils parallelkinematische Aufbauten, deren Beinlänge konstant ist und die eine besonders niedrige Bauhöhe ermöglichen. Im SpaceFAB treibt je eine XY-Anordnung von Linearverstellern drei Einzelbeine an. Das mechanische Layout ermöglicht einen asymmetrischen Aufbau, z.B. längere Stellwege in einer gewählten Bewegungsrichtung.
Spezifikationen
Vor Auslieferung werden die Leistungsspezifikationen geprüft. Manche Spezifikationen sind nicht in Kombination verfügbar. Die Leistungsspezifikationen gelten bei Raumtemperatur (22 ±3 °C) und Systeme im geregelten Betrieb werden bei dieser Temperatur kalibriert (Spezifikationen für abweichende Betriebstemperaturen auf Anfrage). Bei Betrieb bei deutlich niedrigerer oder höherer Temperatur ist eventuell eine Neueinstellung der Betriebsparameter nötig. Sonderanfertigungen für ultra-niedrige oder ultra-hohe Temperaturen auf Anfrage.
Spitzenstrom
Steht nur für sehr kurze Zeiten zur Verfügung, bei Piezoverstärkern / Controllern typischerweise unter einigen Millisekunden. Dient der Abschätzung der möglichen Dynamik mit einer bestimmten kapazitiven Last. Hinweis: In diesem Fall arbeitet der Piezocontroller / Verstärker nicht mehr unbedingt linear.
Steifigkeit
Federkonstante, nichtlinear für piezoelektrische Materialien. In Datenblättern ist die statische Großsignalsteifigkeit des Positionierers bei Raumtemperatur in Stellrichtung angegeben. Kleinsignalsteifigkeit und dynamische Steifigkeit können abweichen, z.B. bedingt durch die aktive Natur des piezoelektrischen Materials oder Verbundeffekte.
Stirnradgetriebe
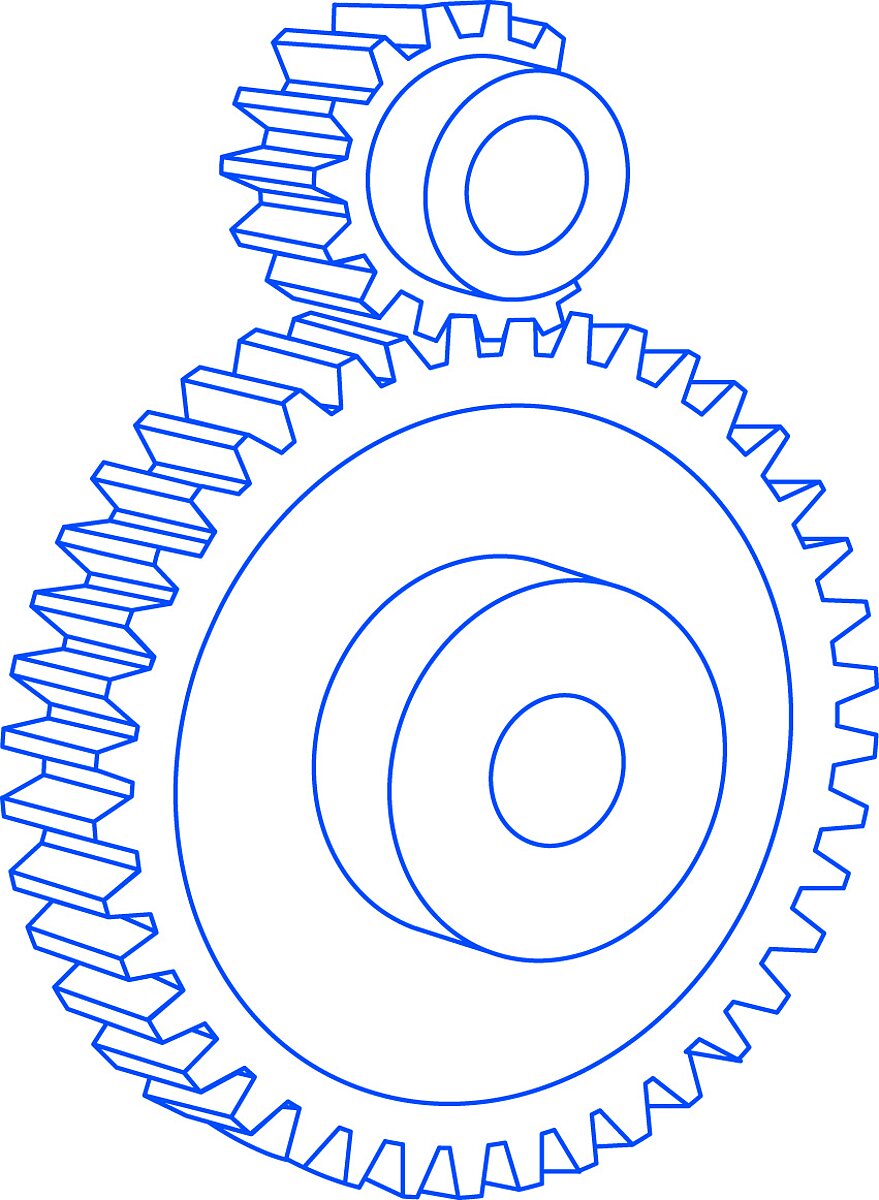
Stirnradgetriebe sind aus zwei parallel zueinander liegenden, unterschiedlich großen Zahnrädern aufgebaut. Aufgrund des einfachen Aufbaus lassen sich Stirnradgetriebe besonders einfach und robust herstellen. Ganzmetall-Ausführungen erfüllen hohe Anforderungen an einen gleichmäßigen und ruhigen Lauf. Für hohe Präzision bei geringem Drehmoment können besonders spielarme Ausführungen realisiert werden. Dazu wird durch gegensinniges Verdrehen der Getriebestränge und deren Verspannung auf dem Motorritzel die Vorspannung entsprechend eingestellt. Neben Planetengetrieben werden in Lineartischen von PI meist Stirnradgetriebe für die Getriebemotoren eingesetzt.
Stromaufnahme
Stromverbrauch des Systems auf der Versorgungsseite. Angegeben im Leerlauf (Controller ohne Last). Alternativ Leistungsaufnahme.
Synchron-Servomotor (SSVM)
Ein Servomotor, der als Synchronmaschine ausgelegt ist. Ein solcher Motor kann beispielsweise aus einem bürstenlosen DC-Servomotor mit Sinuskommutierung realisiert werden.
Siehe >> bürstenloser DC-Motor und >> Servomotor.