Scan Routine
Algorithm that runs a motion sequence and allows the associated data to be evaluated; e.g., search for an optimum analog input signal. Examples include "area scan" and "gradient search".
Sensor Bandwidth
Measured value that specifies the frequency used to decrease the amplitude decreased by -3 dB.
Sensor Linearization
For capacitive sensors, the signal conditioning electronics demonstrates a notably low noise level. The integrated linearization system (ILS) compensates for the influences of parallelism errors between the capacitor plates.
Sensor Resolution
The smallest calculable increment that can be detected by the measuring system used. Rotary encoder: Number of counts per screw rotation. Linear encoder: Smallest increment still detected by the sensor system. The sensor can be the critical element of position resolution so it may be necessary to specify the sensor resolution separately.
See >> Design Resolution.
Serial Kinematics
Stacked or nested setup of a multi-axis motion system. Each actuator acts on its own platform. Actuator and motion axis are uniquely assigned to each other. Assembly and control of several axes are therefore relatively easy. The dynamic characteristics depend on the individual axis. Any guiding errors cumulate and the overall guiding accuracy is poorer when compared to >> Parallel Kinematics, see there.
Serial Metrology
A position sensor is assigned to each servo-controlled motion axis. Undesired crosstalk or guiding errors unnoticed and uncorrected.
Servo Motor
A motor with position detection and control is called a servo motor. The motor itself is often a DC motor. Servo motors offer high torques at a low speed, good dynamics over a large speed range, fast response, low heat generation as well as smooth and vibration-free operation. Either rotary or absolute encoders are used for detecting the position. A servo amplifier takes care of amplifying the signal and controlling the motor parameters. This is normally a PID (Proportional, Integral, Derivative) controller with additional filters in order to exploit the above-mentioned characteristics as best as possible.
SpaceFAB Design
SpaceFABs are partly parallel-kinematic setups which constant strut lengths and a particularly low profile. Each XY arrangement of linear stages in the SpaceFAB drives three individual struts. The mechanical layout allows an asymmetrical setup, e.g., longer travel ranges in the desired direction of motion.
Specifications
The performance specifications are checked before dispatch. Not all specifications can be combined. The performance specifications apply to room temperature (22 ±3 °C) and systems in closed-loop operation are calibrated at this temperature (specifications for different operating temperatures on request). It may be necessary to reset the operating parameters when operating at considerably lower or higher temperatures. Custom designs for ultralow or ultrahigh temperatures on request.
Spur Gears
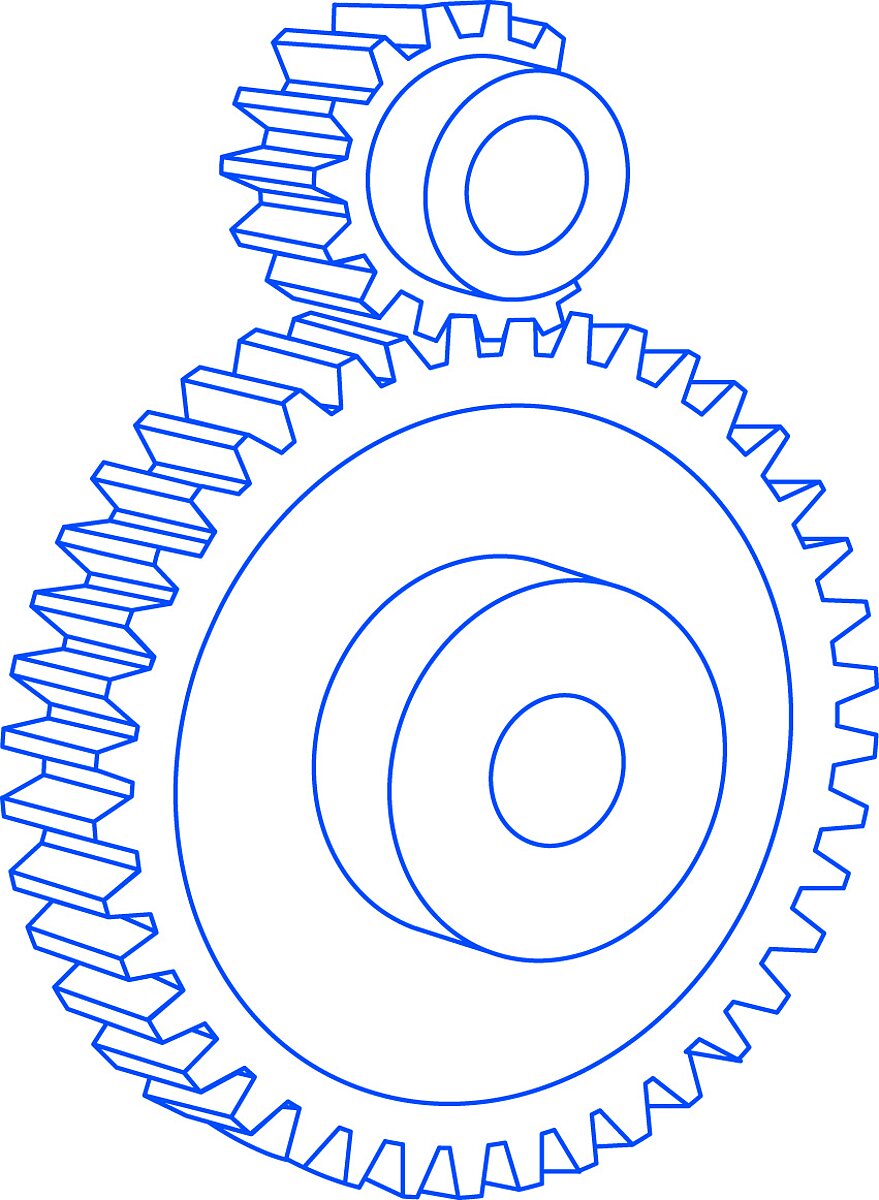
Spur gears consist of two parallel but different-sized toothed wheels. Due to the simple design, spur gears can be manufactured very easily and robustly. Thanks to their simple structure, spur gears are easy to manufacture and robust. All-metal models fulfill high requirements with respect to an even and smooth run and particularly play-free models can be realized for applications where high precision at low torque is needed. To achieve this, the preload is set by inverse twisting of the gear trains and their tension on the motor pinion. In addition to planetary gears, spur gears are the normally the standard choice gear motors in linear stages from PI.
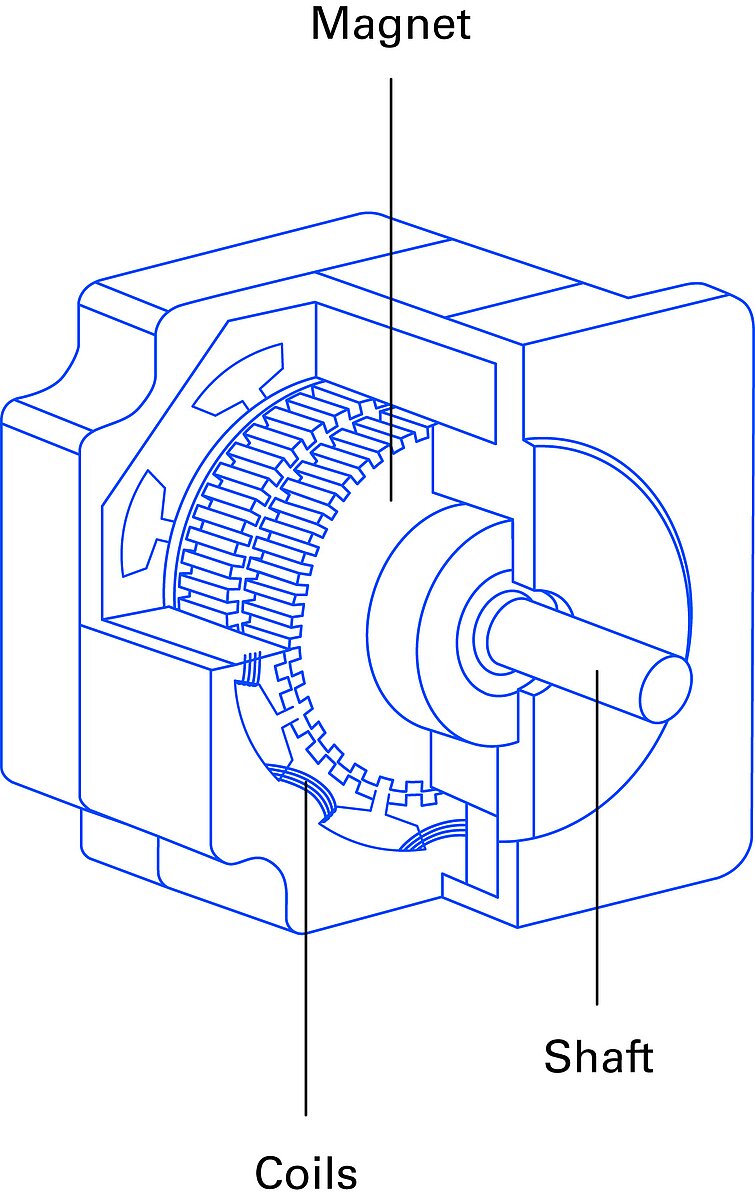
Stepper Motor, 2-Phase Stepper Motor (2SM)
Stepper motors only take discrete positions within one revolution. Due to their quantized steps, stepper motors only offer reduced momentum compared to DC motors. High speeds can only be achieved with a large number of steps at the expense of the torque, because the windings need to be energized against one another in order to set the intermediate steps.
Stepper motors can be set up for applications in a vacuum, have a long lifetime, and can be applied for positioning tasks without the requirement of an encoder. Open-loop operation of stepper motors does not cause position jitter because it is caused by the feedback loop in closed-loop operation. Often, a mechanical damper is applied in the form of a handwheel to enhance smooth running and to suppress resonances.
Stepper motors are available in different configurations.
Stiffness
Spring constant, nonlinear for piezoelectric materials. The positioner's static large signal stiffness is specified for the positioning direction at room temperature in the datasheets. Small signal stiffness and dynamic stiffness may differ for example, because of effects caused by the active nature of piezoelectric material or compound effects.
Straightness
See >> Crosstalk.
Strain Gauge Sensor (SGS)
Strain gauge sensors consist of a thin metal wire packaged on a foil (SGS), or a semiconductor foil (PRS), which is attached to the piezo actuator or to the guiding system (lever, flexure) of a flexure positioner. This type of position measurement is done with contact and indirectly, since the position of the motion platform is derived from a measurement on the lever, guide or piezo stack. Strain gauge sensors derive the position information from their expansion and the resulting change in resistance. Full-bridge circuits with several strain gauge sensors per axis improve thermal stability.
Switching Amplifier / Driver
See >> Energy Recovery.
Synchronous Servo Motor (SSVM)
A servo motor that is designed as a synchronous machine. This type of motor for example, can be realized from a brushless DC servo motor with sine commutation (see brushless >> DC Motor and >> Servo Motor).