


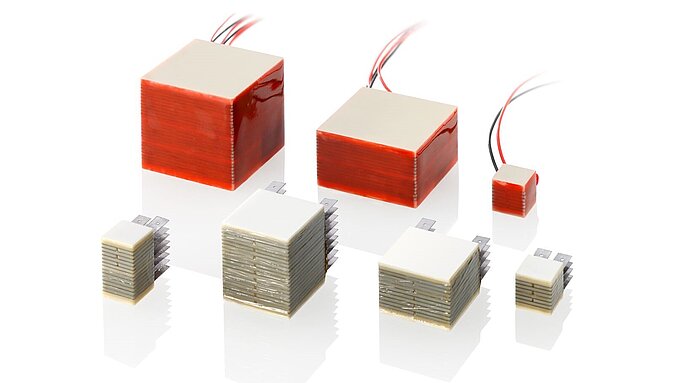
在纵向压电促动器中,陶瓷层中施加的电场平行于极化方向,在极化方向产生应变或位移。单层的位移相对较小。为了实现有技术实用性的位移值,由多个机械串联、电气并联的单层构成的堆叠型促动器(图1)应运而生。 纵向堆叠型促动器可将电能高效地转换为机械能,实现约为促动器长度0.1%至0.15%的名义位移。 额定阻滞力与促动器的横截面积有关(约为30 N/mm2),可高达数万牛顿。 由于其共振频率高,纵向堆叠型促动器非常适用于高动态运行。促动器的机械预加载可抑制脆性陶瓷材料中的动态诱导拉力,实现微秒级的响应时间和较高的机械性能。 纵向位移的估算,其中:




切变促动器

在压电切变促动器中,陶瓷层中施加的电场与极化方向正交,利用的是极化方向的位移。单层的位移也在此处的堆叠型促动器中叠加(图2)。 剪切变形系数d15通常为最大压电系数。额定电压控制时,压电陶瓷可实现高达2000pm/V的d15(GS)值。为了防止垂直方向极化的反转,允许控制场强是受限的。 当横向力量作用于促动器时,弯曲还会叠加在剪切运动之上,且动态运行中共振频率附近也会发生相同效应。 此外,机械预加载无法补偿剪应力,两者都会限制剪切堆叠的实际堆叠高度。切变促动器与纵向促动器的组合产生非常紧凑的XYZ堆叠,且共振频率很高。 滞滑马达的驱动元件为切变促动器一个典型的应用。 切变促动器位移的估算,其中:

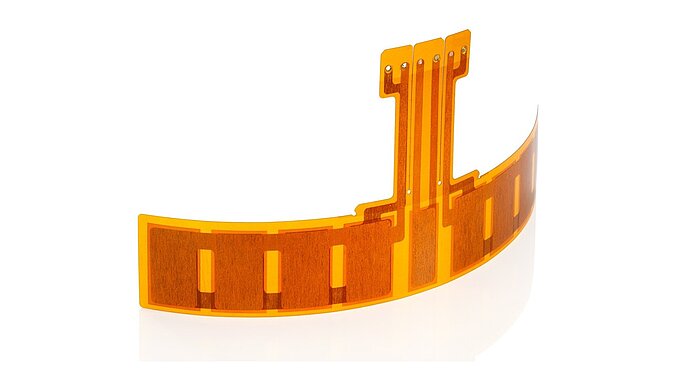
压电管促动器为径向极化。电极施加于外表面,使平行于极化方向的电场也沿径向运行。压电管促动器利用横向压电效应产生位移,如轴向位移或长度变化(图3)、半径变化(图4)等横向运动以及弯曲(图5)等。
为了使压电管弯曲,外部电极被分割成几个部分。当各相反的电极被驱动时,压电管横向弯曲。
更为复杂的电极排列可防止不良倾斜或轴向运动的发生,例如,由8个电极组成的排列可以产生反向弯曲,整体上实现没有倾斜的侧向位移。 压电管促动器常用于在扫描探针显微镜开环运行时提供动态扫描运动,此外,其还常用作光纤拉伸器。另外,其还可用于纳升泵或喷墨打印机的微剂量给料。 关于压电管的尺寸,请参见数据表>> PT120 – PT140。






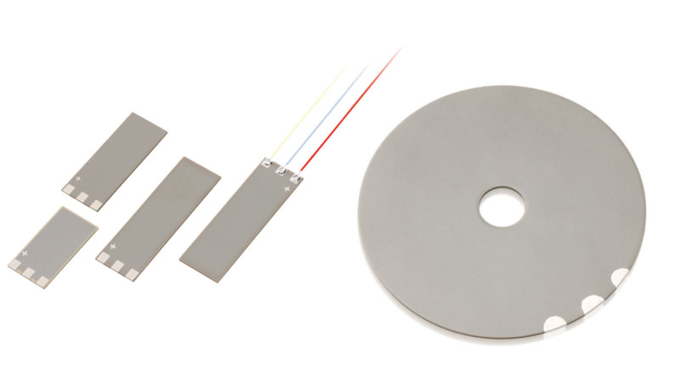
收缩促动器
通常,压电收缩元件为扁平组件,其位移垂直于极化方向和电场。收缩促动器的位移是基于横向压电效应,标称位移约为20µm。 就技术实现而言,多层元件与单层压电元件相比具有决定性的优势:由于横截面积较大,其能产生更大的力,且可在较低电压下运行(图6)。 收缩产生的拉伸应力可能损坏脆性压电陶瓷,因此建议施加预载。 收缩促动器横向位移的估算,其中:




](/fileadmin/_processed_/6/6/csm_PIC_Gleichung_7_78a3ebc92d.png "弯曲位移[m](并联回路)")

](/fileadmin/_processed_/9/d/csm_PIC_Gleichung_9_4d89731fa8.png "弯曲位移[m](双层复合弯曲元)")


](/fileadmin/_processed_/5/8/csm_PIC_Gleichung_8_2d9224919a.png "弯曲位移[m](串联回路)")

](/fileadmin/_processed_/a/3/csm_PIC_Gleichung_10_8cb0c6cf3b.png "弯曲位移[m](三层复合弯曲元)")


