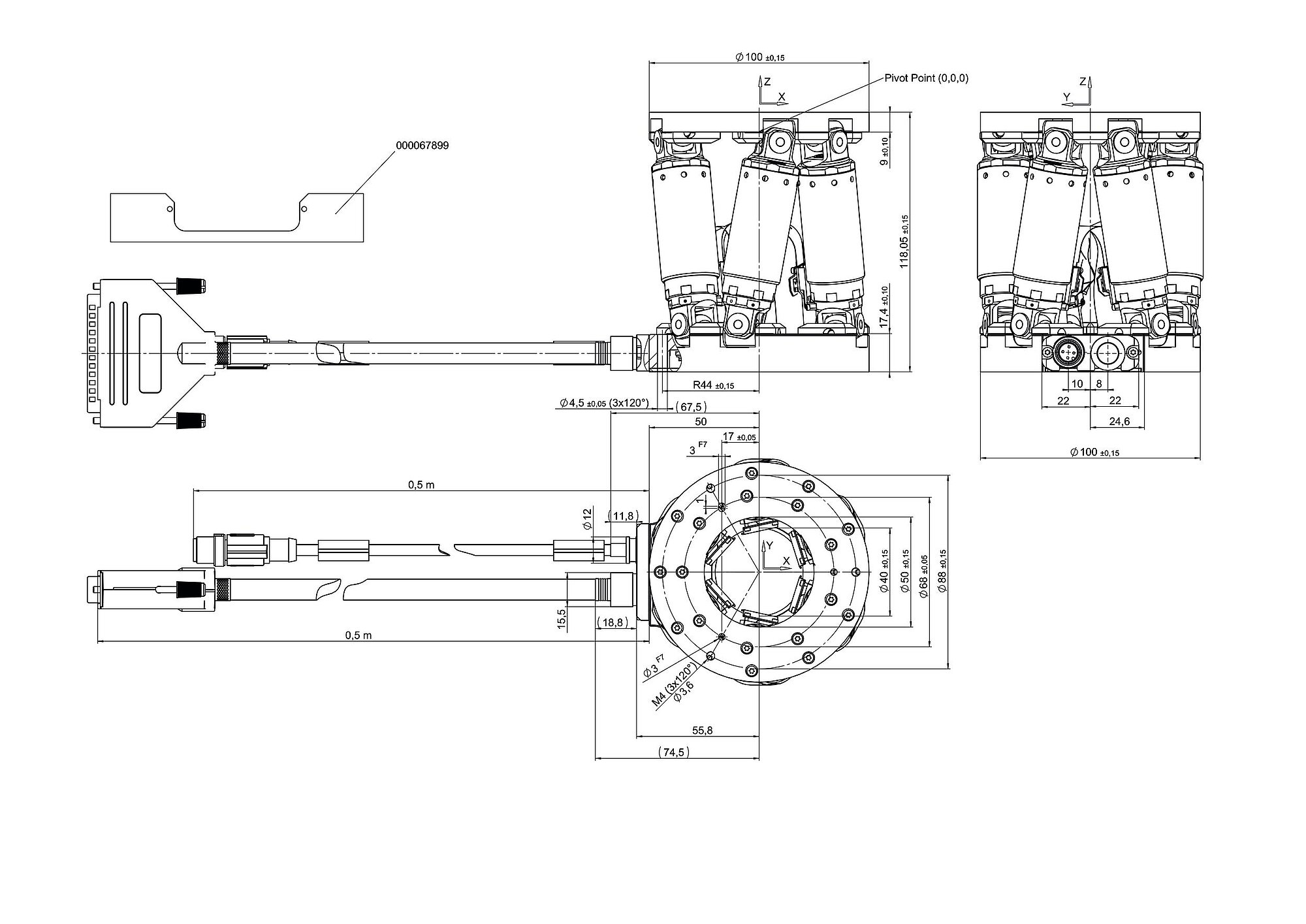
H-810.I2
Miniature hexapod for 6 degrees of motion freedom; BLDC motors; 3 kg payload; 6 mm/s velocity; 0.5 m cable length. Connecting cables are not included in the scope of delivery and must be ordered separately.



Parallel-kinematic design for 6 degrees of freedom, making it significantly more compact and stiff than serial-kinematic systems, higher dynamics, no moved cables: Higher reliability, reduced friction.
BLDC motor
Brushless DC motors are particularly suitable for high rotational speeds. They can be controlled very accurately and ensure high precision. Because they dispense with sliding contacts, they run smoothly, are wear-free and therefore achieve a long lifetime.
PIVirtualMove
The simulation software simulates the limits of the workspace and payload of a hexapod. Therefore, even before purchasing, you can check whether a particular hexapod model can handle the loads, forces, and torques occurring in an application. For this purpose, the simulation tool takes the position and motion of the hexapod as well as the pivot point and several reference coordinate systems into account.
Application fields
Industry and research. For micromanipulation, biotechnology, tool inspection.
| Motion | H-810.I2 | Tolerance |
|---|---|---|
| Active axes | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Travel range in X | ± 20 mm | |
| Travel range in Y | ± 20 mm | |
| Travel range in Z | ± 6.5 mm | |
| Rotation range in θX | ± 10 ° | |
| Rotation range in θY | ± 10 ° | |
| Rotation range in θZ | ± 30 ° | |
| Maximum velocity in X | 6 mm/s | |
| Recommended velocity in X | 3 mm/s | |
| Maximum velocity in Y | 6 mm/s | |
| Recommended velocity in Y | 3 mm/s | |
| Maximum velocity in Z | 6 mm/s | |
| Recommended velocity in Z | 3 mm/s | |
| Maximum angular velocity in θX | 120 mrad/s | |
| Recommended angular velocity in θX | 50 mrad/s | |
| Maximum angular velocity in θY | 120 mrad/s | |
| Recommended angular velocity in θY | 50 mrad/s | |
| Maximum angular velocity in θZ | 120 mrad/s | |
| Recommended angular velocity in θZ | 50 mrad/s | |
| Positioning | H-810.I2 | Tolerance |
| Minimum incremental motion in X | 0.5 µm | typ. |
| Minimum incremental motion in Y | 0.5 µm | typ. |
| Minimum incremental motion in Z | 0.25 µm | typ. |
| Minimum incremental motion in θX | 8 µrad | typ. |
| Minimum incremental motion in θY | 8 µrad | typ. |
| Minimum incremental motion in θZ | 15 µrad | typ. |
| Unidirectional repeatability in X | ± 0.3 µm | typ. |
| Unidirectional repeatability in Y | ± 0.3 µm | typ. |
| Unidirectional repeatability in Z | ± 0.08 µm | typ. |
| Unidirectional repeatability in θX | ± 2.5 µrad | typ. |
| Unidirectional repeatability in θY | ± 2.5 µrad | typ. |
| Unidirectional repeatability in θZ | ± 10 µrad | typ. |
| Backlash in X | 0.7 µm | typ. |
| Backlash in Y | 0.7 µm | typ. |
| Backlash in Z | 0.2 µm | typ. |
| Backlash in θX | 10 µrad | typ. |
| Backlash in θY | 10 µrad | typ. |
| Backlash in θZ | 20 µrad | typ. |
| Drive Properties | H-810.I2 | Tolerance |
| Drive type | Brushless DC motor | |
| Nominal voltage | 24 V | |
| Mechanical Properties | H-810.I2 | Tolerance |
| Maximum load capacity, base plate in any orientation | 1.5 kg | |
| Maximum load capacity, base plate horizontal | 3 kg | |
| Maximum holding force, base plate horizontal | 15 N | |
| Overall mass | 1.7 kg | |
| Material | Stainless steel, aluminum | |
| Miscellaneous | H-810.I2 | Tolerance |
| Operating temperature range | 0 to 50 °C | |
| Connector for data transmission | HD D-sub 78 (m) | |
| Connector for supply voltage | M12 4-pole (m) | |
| Cable length | 0.5 m | |
| Outer diameter power supply cable | 4.95 mm | |
| Minimum bending radius for fixed installation, power supply | 25 mm | |
| Outer diameter data transmission cable | 9.5 mm | |
| Minimum bending radius for fixed installation, data transmission | 95 mm | |
| Recommended controllers/drivers | C-887.52x, C-887.53x |
The cables fixed to the H-810.I2 are 0.5 m long respectively.
When measuring position specifications, typical velocity is used. The data is included in the delivery of the product in the form of a measurement report and is stored at PI.
The maximum travel ranges of the individual coordinates (X, Y, Z, θX, θY, θZ) are interdependent. The data for each axis shows its maximum travel range when all other axes are in the zero position of the nominal travel range and the default coordinate system is in use, or rather when the pivot point is set to 0,0,0.
At PI, technical data is specified at 22 ±3 °C. Unless otherwise stated, the values are for unloaded conditions. Some properties are interdependent. The designation "typ." indicates a statistical average for a property; it does not indicate a guaranteed value for every product supplied. During the final inspection of a product, only selected properties are analyzed, not all. Please note that some product characteristics may deteriorate with increasing operating time.
H-810.I2 Hexapod Microrobot
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
Miniature hexapod for 6 degrees of motion freedom; BLDC motors; 3 kg payload; 6 mm/s velocity; 0.5 m cable length. Connecting cables are not included in the scope of delivery and must be ordered separately.
Quickly receive an answer to your question by email or phone from a local PI sales engineer.
When it comes to throughput and production costs in testing, assembling, and packaging of photonic devices, alignment is one of the most significant cost factors. For maximum performance, the optimal combination of accuracy, speed, and intelligent automation is needed.

Investigation of the structural properties of thin films under high-vacuum conditions.

What do optical components and glass fibers in photonics, mobile devices, and high-quality wristwatches all have in common?











