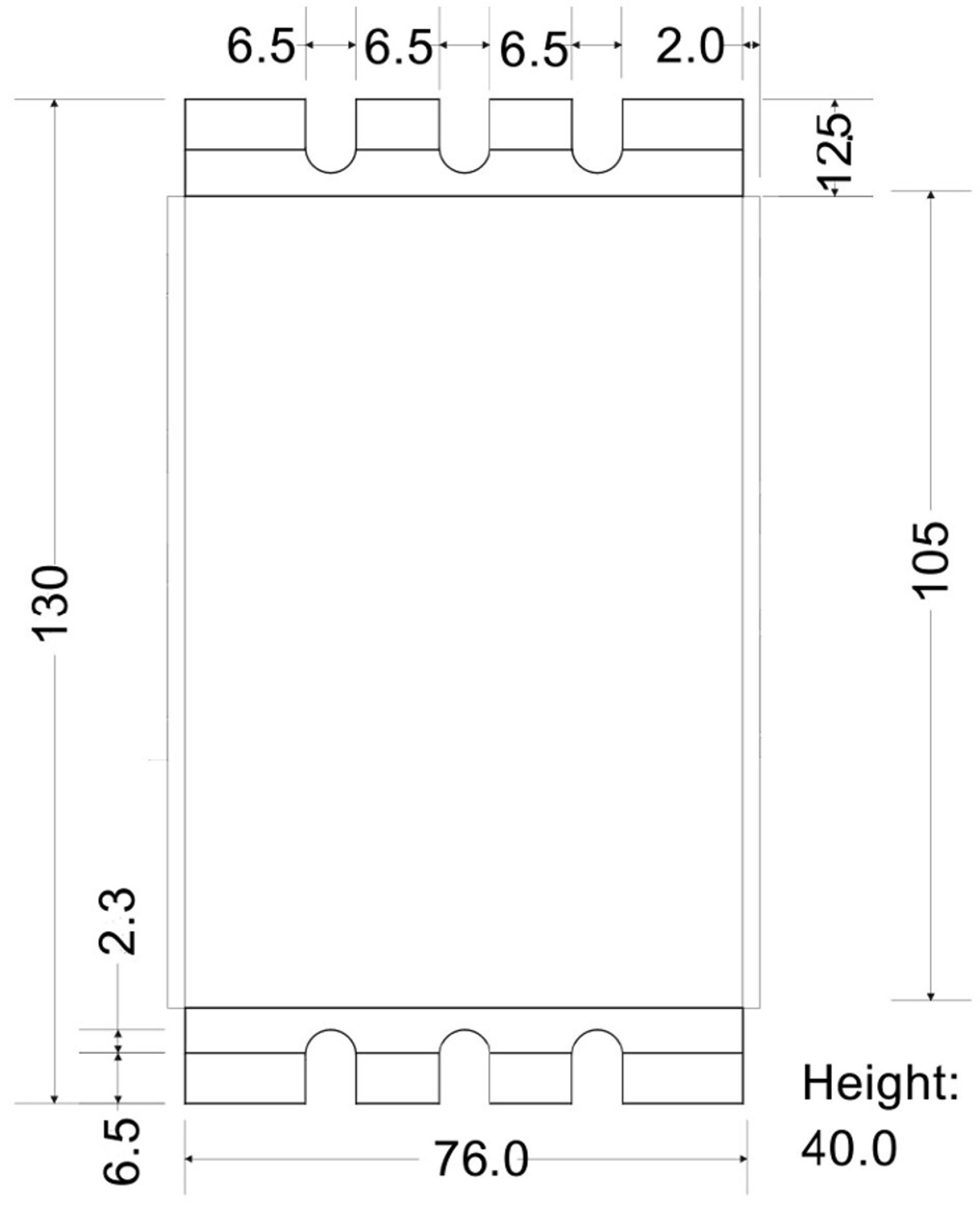
C-863, dimensions in mm. Note that a comma is used in the drawings instead of a decimal point.
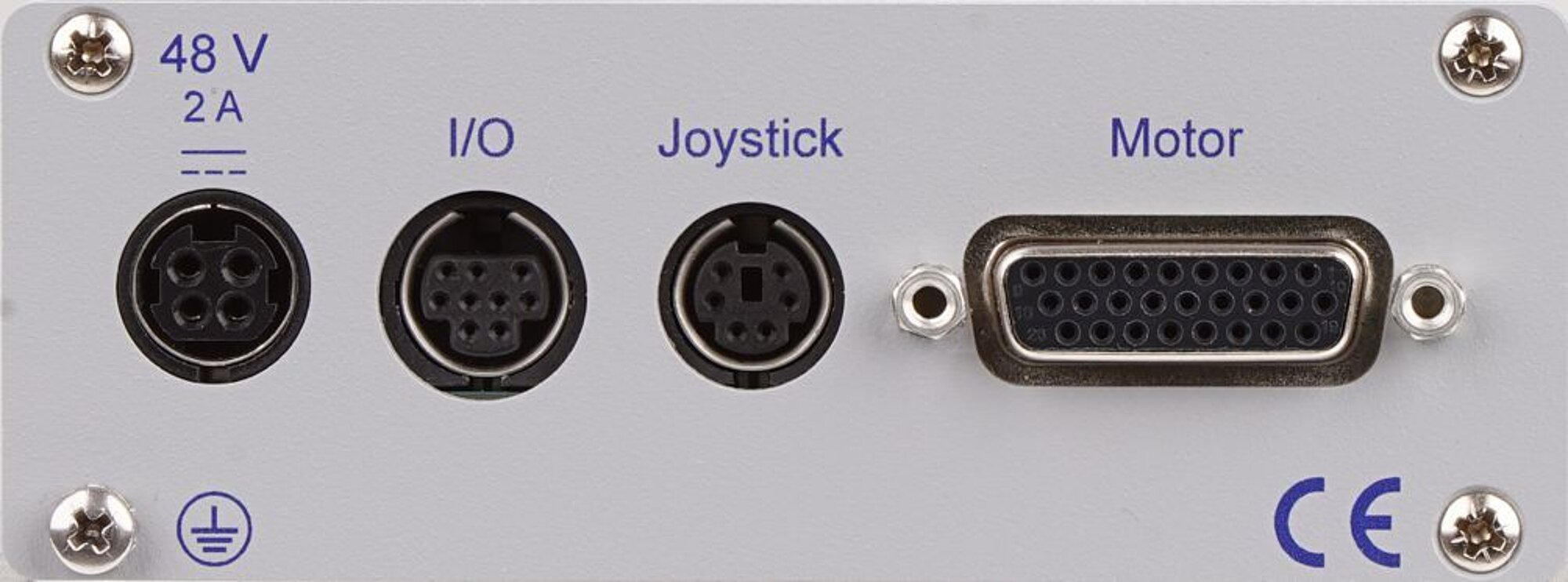
C-863.12: Rear view
Scope of delivery for the C-863.12: Controller with power adapter and power cord, communication cables, adhesive feet, software CD, and user documentation
C-863 Mercury Servo Controller
Product Description
Specifications
Downloads
Quote / Order
Digital motion controller for DC servo motors
1 axis. Motion control of PI positioning systems with DC motor: Direct motor control; PWM control for fast PI stages with integrated ActiveDrive amplifiers or with brushless motors and integrated block commutation. PID controller. Supports motor brake.
Interfaces and communication
USB and RS-232 interface for commanding. A/B quadrature encoder input. TTL inputs for limit and reference switches. I/O lines (analog/digital) for automation. Connector for analog joystick. Daisy chain networking for up to 16 axes operated via a common computer interface.
Extensive functions, software support
Powerful macro command language. Nonvolatile macro storage, e.g., for stand-alone operation with autostart macro. Data recorder. PID controller, parameter changing during operation. Extensive software support, e.g., for NI LabVIEW, C, C++, MATLAB, Python. PIMikroMove user software.
Motors with PWM control, e.g., ActiveDrive amplifiers or brushless motors with integrated block commutation
Axes
1
Supported functions
Point-to-point motion. Startup macro. Data recorder for recording operating data such as motor voltage, velocity, position or position error. ID chip detection. Internal safety circuitry: Watchdog timer.
Motion and control
C-863.12
Controller type
PID controller, parameter changing during operation
Servo cycle time
50 µs
Profile generator
Trapezoidal velocity profile
Encoder input
A/B quadrature single-ended or differential TTL signal acc. to RS-422; 60 MHz
Stall detection
Automatic motor stop when a programmable position error is exceeded
Limit switches
2 × TTL (programmable polarity)
Reference switch
1 × TTL
Motor brake
1 × TTL, can be switched by software
Electrical properties
C-863.12
Max. output voltage*
0 V to operating voltage, for direct control of DC motors
Max. output power
60 W
Average output power
48 W
Power consumption, full load
48 W
Power consumption without load
3 W
Current limitation
2.5 A
Interfaces and operation
C-863.12
Communication interfaces
USB; RS-232, D-sub 9 (m)
Motor connector
HD D-sub 26 (f)
Controller network
Up to 16 units** on a single interface
I/O lines
4 analog / digital inputs (0 to 5 V / TTL), 4 digital outputs (TTL)
Command set
PI General Command Set (GCS)
User software
PIMikroMove
Application programming interfaces
API for C / C++ / C# / VB.NET / MATLAB / Python, drivers for NI LabVIEW
Manual control
Joystick, Y cable for 2-D motion, pushbutton box
Miscellaneous
C-863.12
Operating voltage
12 to 48 V DC *** from external power adapter (24 V DC power adapter included in the scope of delivery)
Max. current consumption
40 mA without load (when supplied with 48 V)
80 mA without load (when supplied with 24 V)
Operating temperature range
5 to 50 °C (temperature protection switches off at excessively high temperatures)
Mass
0.48 kg
Dimensions
130 mm × 76 mm × 40 mm (incl. mounting rails)
* The output voltage depends on the power adapter connected.